
- 0
- 0
- 0
分享
- 机器人“跨界”马拉松!21公里耐力战,谁能夺魁?
-
原创 04-15


一场十级大风,让原定4月13日举行的全球首场人机马拉松被迫延期——这场赛事不仅是人类与AI的竞技场,更是中国机器人技术的“极限考场”。
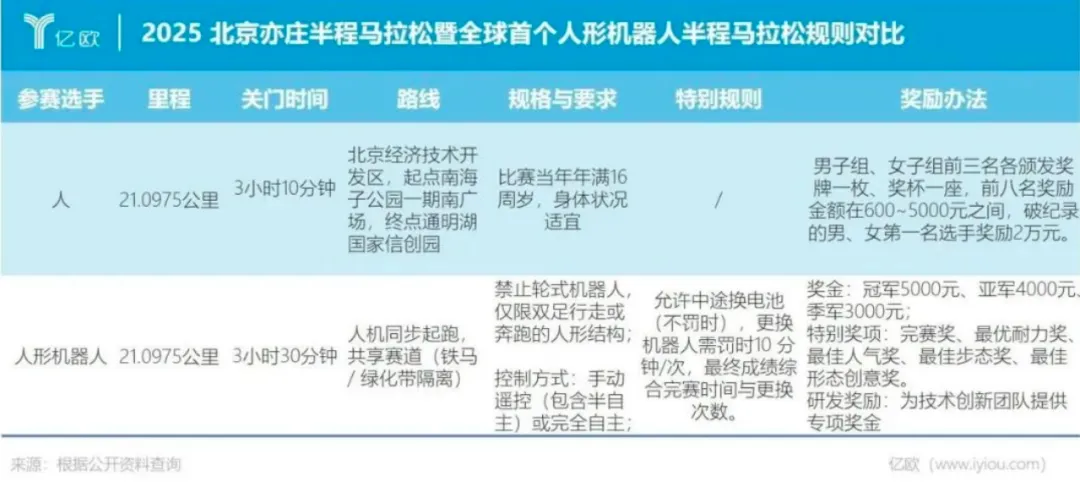
4月19日7:30,北京亦庄半程马拉松将正式鸣枪,24支参赛队伍、近20支机器人“跑团”将挑战21.0975公里赛道。

此次参赛的“钢铁跑团”包括清华大学、北京理工大学、北京科技职业大学等高校的机器人,也有北京人形机器人创新中心、北京通用人工智能研究院等研究机构、企业的机器人。
这场赛事不仅关乎胜负,更是一场关乎中国机器人产业从实验室走向真实场景的“成人礼”。
机器人跑半马的三大难关
这场全球首次人机共跑,既是科技的狂欢,更是对双足机器人的“地狱级测试”。
关节散热:钢铁之躯也怕“中暑”
人形机器人的一体化关节如同人类膝盖,但马拉松的持续奔跑让这些精密部件面临高温考验。
北京人形机器人创新中心的“天工”在训练中就因关节过热导致脚踝断裂,工程师不得不为其加装散热片,甚至借鉴人类运动员的肌效贴原理优化散热结构。高功率密度关节的散热技术,直接决定了机器人能否撑过21公里。
动态平衡:比走钢丝更难的双足奔跑
双足机器人需要协调18~30个关节运动,模仿人类“单支撑-双支撑-腾空”的步态循环。松延机器人在测试中曾因算法失误突然静止,暴露出动态避障与定位精度不足的痛点。尤其在上下坡路段,足底传感器需实时调整重心偏移,上海青心意创团队为此专门开发了坡道适应性算法。
续航焦虑:换电比人类上厕所更揪心
当前机器人平均续航仅2~4小时,赛道设置的7个补给站成为“救命稻草”。
天工机器人在测试中完成换电需5分钟,而赛事规则规定每次换电罚时10分钟——这相当于人类跑者每公里配速慢1分钟。更残酷的是,部分机器人因电池快换技术不成熟,不得不直接更换整机,所花费时间就更多。
谁才是机器人赛道的“六边形战士”
从实验室“宅男”到赛道“卷王”,这群机器人不仅要完赛,还要秀出中国智造的肌肉。4月9日晚参赛机器人进行了排位赛。
“夸父”(乐聚)
乐聚(深圳)机器人技术有限公司带来的参赛选手“夸父”人形机器人的步速最高可达4.6km/h,能够适应多地形。
据悉,夸父在半马预赛中一口气跑了5km,中间没有出现失误、没有进行换机。
“天工”(北京人形机器人创新中心)
基于"慧思开物"通用具身智能平台,“天公”通过仿真环境训练优化了关节力矩与转速的峰值边界,将峰值速度提升至每小时12公里(比赛计划以7-8公里/小时配速完赛)。

图片来源:新京报旗下摄影类公众号拍者(ID:ipaizhe)
研发团队通过结构减重和刚柔耦合设计,平衡了机器人本体的重量与刚度,增强了腿部抗冲击能力,保障长距离奔跑的稳定性。
此外,"天工"的智能系统能精准判断自身状态与环境变化,动态调整步伐以应对转弯、斜坡等复杂地形,并通过拟人化跑姿训练提升动作自然度。其创新散热技术(关节导热与风冷)支持21公里长续航,当前采用半自主导航模式(跟随领航员信号装置),未来将向全程自主导航升级。
“天工”在室内测试的平均配速大概在10千米/小时,最高能达到12千米/小时。但是为了更加稳定地参加比赛,跑完半马全程,工程师们将“天工”的配速降至7-8千米/小时。
“幻幻”(钢宝队)
双足仿生机器人“幻幻”是此次半马的唯一“女性机器人”。

图片来源:新京报旗下摄影类公众号拍者(ID:ipaizhe)
她深度融合双足运动控制与自研VLA大模型技术。其仿生运动系统支持1米/秒行走速度。其石墨烯双通道散热设计保障了4.5小时的持久续航。
卓益得行者二号机器人(卓益得)
卓益得行者二号机器人是业内率先推出的基于肌腱仿生驱动的全尺寸双足人形机器人,具备轻量化、长续航、高效能等特点。
卓益得机器人,赞27
松延N2(松延动力)
N2以小巧灵活见长,身高仅1.2米、重30千克,搭载18个高性能关节,运动爆发力突出,可完成高难度后空翻动作,背后依托自研运动控制算法。
此次分设“旋风小子”(速度优先)和“小顽童”(优雅步态)双队伍参赛,针对半马挑战,团队创新设计粘胶鞋垫增强抓地力,关节采用氧化模具钢强化抗冲击性,并加装球套减少磨损。
其硬件与算法的协同优化既保障了长距离运动的可靠性,也验证了动态场景下的技术综合性能,为双足机器人高动态运动能力树立新标杆。
灵宝SE(中科慧灵)
灵宝SE作为实验室版本参赛,采用轻量化设计策略:身高较量产版更矮,移除灵巧手和视觉识别头部装置以减轻重量,提升操控性。

银色机器人为此次参赛的灵宝SE
其硬件设计注重散热与续航优化,关节装置外露增强散热效率,胸前配备大面积风机散热孔,背面电池裸露便于快速更换,保障长时间运行的稳定性。
参赛团队选择手动遥控或自主控制方式,旨在通过半马场景测试真实数据,为后续民用版02机器人研发提供参考,并借赛事平台推动技术交流与合作。
4月19日的北京,当众多机器人将和参赛者站在同一起跑线上,这场马拉松的价值早已超越竞技本身。那些曾被我们视为科幻的场景,正在加速成为现实。
-
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文由 文化科技融合汇 授权 数艺网 发表,并经数艺网编辑。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 本站部分文字及图片来源于网络,如侵犯到您的权益,请及时告知,我们将及时处理或删除。
-

-
南京
甲方 · 运营商
已认证的机构号




")






