
- 0
- 0
- 0
分享
- 新品发布 | 稳石机器人最强大脑ROC1000「智控」未来
-
原创 2024-08-01
在工业4.0时代,智能制造席卷着每一个渴望创新与效率提升的工厂。自主移动机器人(AMR)成为企业数字化转型的关键,而作为AMR的“精密大脑”,控制器全天候接收指令、处理数据、执行动作,确保机器人安全、高效地在多变环境中导航与作业。可以说,控制器让机器人拥有了“生命”。

日前,在「第五代多模态柔性一体化控制器」基础上,稳石机器人隆重推出全新控制器「ROC1000」,全新的AMR控制器不仅延续了原有控制器的卓越性能,在设计上体积更紧凑,机械抗震能力增强,接口布局
更合理,更在柔性、智能化和操作效率方面实现了显著提升。
相较于通用工业运动控制器或PLC,稳石机器人的「ROC1000」集成了先进的算力板、控制板和交换机技术,显著提升CPU算力,不仅具备建图与定位、导航与路径规划、避障系统、运动控制、外设拓展、供电管理和多通讯接口等基础功能,还通系统平台Artistealler晶阵-机器人集群调度系统、i-WMS 智能仓储管理系统和车机系统WSRC,极大提升物流自动化和数字化管理效率。
01/多重任务,实时响应
复杂路径规划、实时避障、多机器人协调、高级图像处理和数据分析等高要求业务场景需要控制器具备更强的计算能力。
「ROC1000」控制器搭载了高性能处理器Intel 12Core Wi7 1265U,基础频率为1.8GHz,最大睿频可达4.8GHz,强大算力能够提供快速的决策支持和更敏捷的反应速度。相较于前代产品,CPU性能显著提升。
02/稳定可靠,操作便捷

内存是控制器的“大脑”,直接影响其运行的稳定性和处理任务的流畅度。「ROC1000」控制器支持DDR4 3200MHz内存,最大可扩展至32GB,确保机器人在执行复杂任务时的流畅性和操作稳定性。
此外,控制器配备1个HDMI接口,支持高达4096*2160分辨率的高清显示输出,提供清晰的图像和流畅的视频播放,便于直观监控机器人的运行状态。
03/丰富接口,易于拓展

网络连接、外设扩展和开发支持可确保控制器的高效通信、灵活应用和持续创新。
「ROC1000」控制器具备以下增强功能:
网络连接:配备8个LAN接口,支持10/100/1000Mbps高速以太网,确保在各种网络环境下的稳定通信。
外设扩展:提供多种接口,兼容激光扫描器、驱动器和传感器等设备,满足广泛的应用扩展需求。
开发支持:提供全面的API接口和脚本开发工具,支持TCP/IP、Modbus等常用通信协议,便于开发者进行定制化开发和系统集成。
04/精准导航,灵活运动
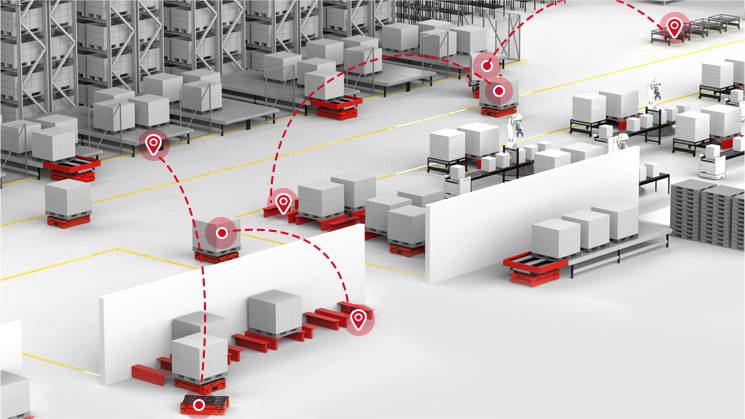
先进的传感器技术为控制器提供了精确的环境感知和定位能力,是实现机器人自主导航和智能决策的关键。
「ROC1000」控制器集成了多重的传感器技术,如激光雷达、摄像头和IMU,能够高效处理大量数据,20Hz动态路径规划和100Hz多传感器融合定位,可支持2万平方米的3D建图和高精度导航定位,精度可达±1mm。
搭载该控制器的AMR/无人叉车,具备校准托盘和料架识别功能,支持包括麦克纳姆轮、单舵轮、双轮差动在内的多种运动模型,确保机器人在复杂环境中的精准操作和可靠性。
05/上电自启,安全可靠

此外,「ROC1000」控制器还预留专用航空车载电源接口,支持上电自启功能,确保设备的稳定运行和快速启动;支持+12-28VDC供电,具备过压、接反保护功能,采用压铸铝和钢管一体化散热设计,保障设备稳定运行。
06/灵活安装,开箱即用
「ROC1000」控制器提供嵌入式和控制柜壁挂式两种安装方式,适应不同的安装环境和需求,并通过动态可执行脚本的引入,实现车端业务与车体能力的完全分离,配合调度系统,可达到完全的量产标准化与开箱即用。
尽管我国移动机器人市场增长强劲,但长期以来,90%的核心零部件依赖进口,相关核心零部件的核心技术大多掌握在外国厂商手中。特别是工业机器人控制器市场,主要由日系和欧美品牌主导,这种情况成为制约我国移动机器人行业健康发展的因素之一。
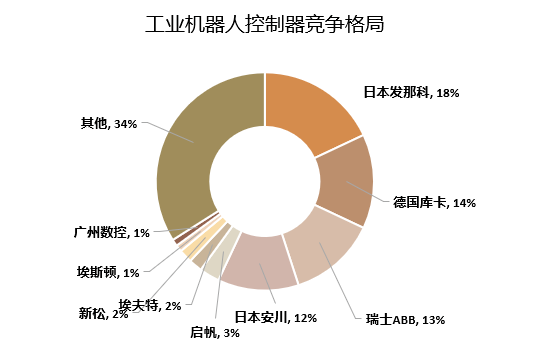
根据《2023年中国工业机器人控制器行业竞争格局及市场规模前景分析》的调研,国内企业在控制器技术方面尚未成熟,导致国产机器人成本较高,难以与外资品牌竞争,限制了其大规模生产和推广,美日韩等外资厂商凭借其技术优势,占据了国内工业机器人控制器市场的大部分份额。
稳石机器人自主研发的控制器系列产品,不仅能有效控制成本,显著提升客户满意度,加速项目实施,并有效减少后续维护问题。搭载「ROC1000」控制器的机器人不仅更智能、灵活,还能快速响应业务需求,适应智能制造和智能仓储的复杂应用场景。随着控制器技术的不断升级,集成更先进的算法,机器人将实现自主学习和优化,推动工业自动化向更高效、灵活和创新的方向发展。
-
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文由 稳石机器人 授权 数艺网 发表,并经数艺网编辑。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 本站部分文字及图片来源于网络,如侵犯到您的权益,请及时告知,我们将及时处理或删除。
-

-
深圳
设备厂商 · 其他设备
未认证的机构号
recently released
-
2024-09-23
-
2024-09-13











