
- 0
- 0
- 1
分享
- 基于虚拟样机技术的七自由度大翻板设计解析*
-
原创 2024-08-06
摘 要:
本文介绍了江西赣州于都长征大剧院采用的七自由度机电液一体化巨型舞台机械装置,解析了在其研发过程中引入虚拟样机技术进行三维设计、有限元分析和动力学仿真等措施。
0 前言
2023年3月23日,红色文旅史诗剧《长征第一渡》在江西赣州于都长征大剧院成功首演。该剧场采用独创的七自由度机电液一体化巨型装置,可实现整个主舞台区域大范围、大角度的升降、平移、旋转和翻转,结合声、光、电等高科技手段,逼真再现江河、雪山、草地等恢弘场景,给观众带来强烈的感官冲击。
1 项目背景
1.1应用场景
七自由度大翻板是应用在江西赣州于都长征大剧院的核心装置,长征大剧院是以宣传长征精神为主题的演艺剧场,有1 200个座位,见图1。

1.2 文化背景
于都县位于江西省南部,是中央红军长征集结出发地、长征精神发源地,见图2。

1934年10月,第五次反“围剿”失败后,中央红军从瑞金、兴国等地退守到于都集结,8.6万人在四个夜晚秘密渡过于都河,踏上二万五千里长征第一步,这才有了“夜渡于都河”的故事。
1.3 创意要求
《长征第一渡》的导演要求在主舞台区域表现出血战湘江、四渡赤水、巧渡金沙江、强渡大渡河、飞夺泸定桥、爬雪山、过草地等诸多场景;舞美设计提出将主舞台分割为两大一小共三块翻板,要求能够实现大范围大角度的升降、平移、旋转和翻转,结合声、光、电、水、火、烟等特效手段,再现江河、雪山、草地等恢宏场景。下面简单介绍关于该装置的机械实现的技术路线和具体措施。
2 总体路线
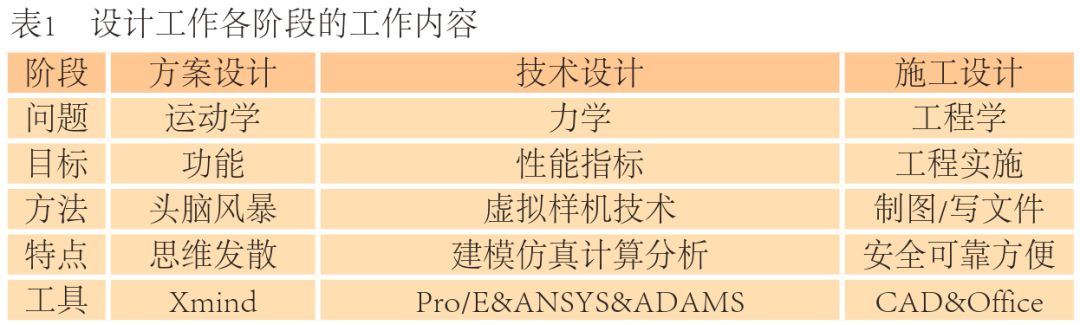
非标机械设计通常包括方案设计、技术设计、施工设计这三个阶段,分别要解决运动学、力学和工程学三个方面的问题。其中在技术设计阶段,要用到虚拟样机技术进行大量的建模、仿真、计算、分析工作。见表1所示。
3 方案设计
方案设计阶段主要是解决运动学的问题,满足客户对机械装置的功能要求。
在进行方案讨论时,主要有两种意见:一种是传统的轴向运动组合机构,另一种是机械臂式串联机构。表2是两个方案的定性对比分析。
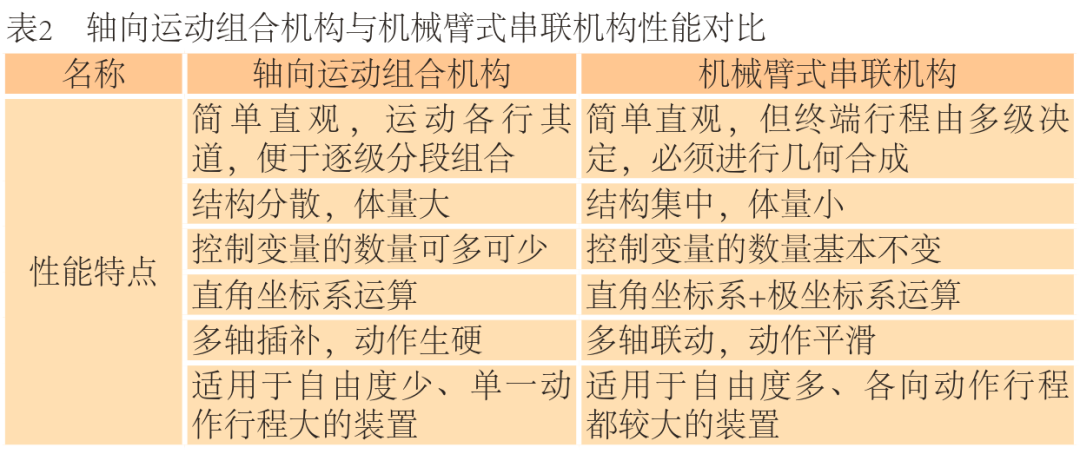
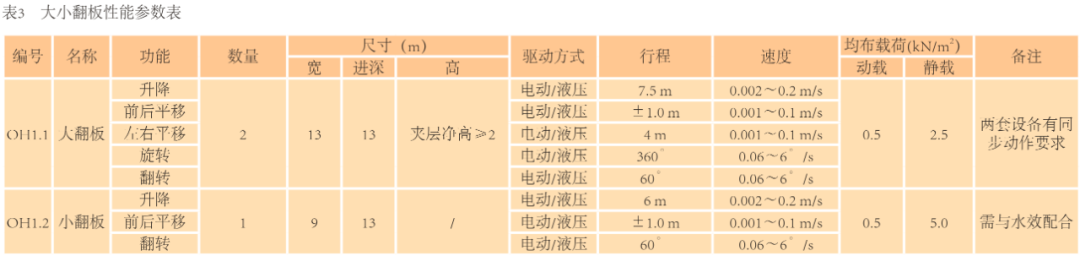
根据创意要求,大翻板需要较大幅度多方向的连贯动作,小翻板只需要升降和翻转。所以,最终讨论决定:两个大翻板采用机械臂式串联机构,一个小翻板采用Z轴升降+X轴翻转组合机构。导演和舞美设计对此方案非常满意。该阶段还确定了大小翻板的性能参数,见表3所示。
4 技术设计
技术设计阶段主要是解决力学的问题,要进行三维建模、动力学仿真、结构有限元分析和工程计算,完成对土建、电气等专业提资,满足机械装置的性能指标要求。具体包括以下内容:
1) 对大翻板的终端部件——表演平台进行结构设计。表演平台台面尺寸13 m×13 m×2.5 m,需计算其在空载、满载、偏载、水平、偏转等各种工况下的受力和变形,见图3。为减轻自重,选用铝合金型材先焊接后拼装,经过优化后结构净重8 t,1阶和2阶固有频率分别为 6.3 Hz、6.5 Hz。这一步是后续计算的依据和基础。
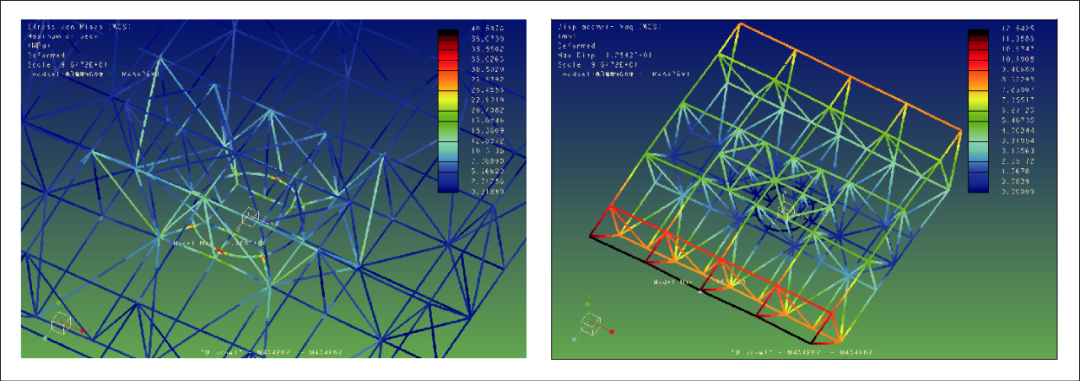
图3 表演平台应力与变形云图
2) 先在Pro/E中建立整体结构的三维模型,然后导入到ADAMS中进行各种工况下的动力学仿真,分析各关节的受力状态。
3) 根据受力条件的最大值,采用自顶向下的顺序逐级完成各关节的结构设计,见图4。第2步和第3步需要反复迭代,逐渐优化。
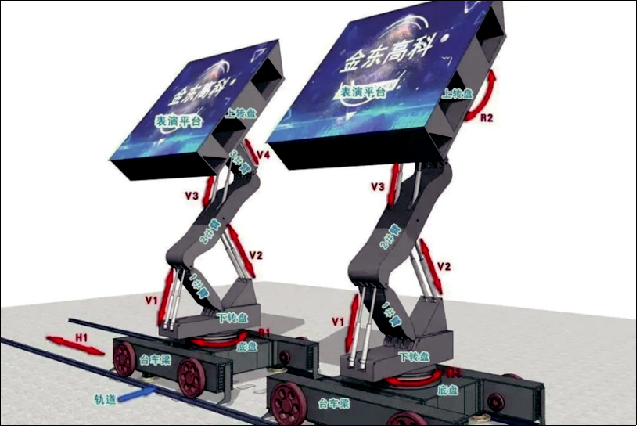
4) 进行驱动元件的工程计算、选型和布局,主要是电机、减速机、油缸和液压系统的计算。单台大翻板设备V1~V4共八支油缸联动,最大同时使用流量1 600 L/min。
5)提出土建条件和电气控制条件。土建条件的重点是液压机房、水泵房的布局和基坑预埋件的受力条件;电气控制条件的难点是几何运动参数方程的确定。
5 施工设计
施工设计阶段主要是解决工程学的问题,满足机械装置的工程实施(加工、安装、调试和使用)要求。主要包括:绘制全部工作图(如零件图、部件装配图和总装配图等)、制订全部技术文件(如零件表、易损件清单、设计总说明、工程计算书、试验大纲、使用手册、维护维修说明书等)。
即便是在施工设计阶段,工程计算也是必不可少和至关重要的,这是非标机械设计的特点决定的。最终设计完成的大翻板单体设备重量约150 t。
6 现场效果
6.1 工厂加工
在工厂阶段有两个重点要把控:
1) 大型结构件的焊后去应力再加工,从而保证产品的加工精度和尺寸稳定性。
2) 创造条件进行工厂试装与试验,要综合考虑时间、经费、场地、动力等等因素来制定工厂试验大纲。见图5。

6.2 现场调试
该装置的终端行程由多级机构决定,必须进行几何合成,实时求解直角坐标系+极坐标系联立的运动方程组。特别是两套装置要进行同步运动控制,现场调试的技术难度很大。
6.3 演出实景
《长征第一渡》自首演到现在已经超过一年时间,反响很好。演出场景见图6所示。

7 结语
7.1虚拟样机技术的应用与发展
1) 虚拟样机技术是指利用虚拟样机代替物理样机来对其候选设计的各种特性进行测试和评价。
2) 虚拟样机技术的概念仍处于发展的阶段,在不同应用领域中存在不同定义。
3) 联合仿真技术的发展:模型共用与转换,跨平台联合仿真,软件各有擅长。
4) 开发平台的统一与提升:在同一平台下完成建模与仿真所有工作。
5) 有用好用才是硬道理,最终目的是为了设计出更好的产品。
7.2 多自由度串并联机构的设计要点
1) 串联机构具有技术成熟、结构简单、控制简单、运动空间大、速度快、成本低等优点,已有多个成功案例,例如,武汉“汉秀”LED屏机械臂(六自由度串联)、“丝路之声”浑天仪(五自由度串联)。重点要把握好结构优化问题,做到刚度与惯量相协调,建议采用自顶向下设计方法。
2) 并联机构具有刚度大、承载能力强、精度高、末端件惯性小等优点,适用于高速重载场合,例如,六自由度运动平台、火星着陆试验平台(36道索并联)。重点要把握好运动分析问题,特别是动力学仿真分析。
3) 串并混联机构有助于实现结构的简单化和功能的集成化,重点要把握好构型的创新设计,合理划分界面。例如,火星着陆试验平台中粗调与精调机构。
4) 在控制算法上,串联机构正解容易,反解困难;并联机构正解困难,反解容易。
5)串/并联机构的闭环控制:增加终端位置、加速度检测元件,例如,倾角仪、陀螺仪、激光检测仪等。
-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号演艺科技传媒 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
-

-
北京
甲方 · 垂直媒体
未认证的机构号
recently released
-
01-22
-
2024-12-27






