
- 0
- 0
- 0
分享
- UCSD、MIT等华人团队教机器狗感知3D世界!搭M1芯片,爬楼跨障无所不能|CVPR 2023
-
2023-05-19

新智元报道
新智元报道
【新智元导读】用苹果M1芯片思考,还能自己遛自己的机器狗,你见过吗?
长了4条腿的MacBook?

现实世界中的实验





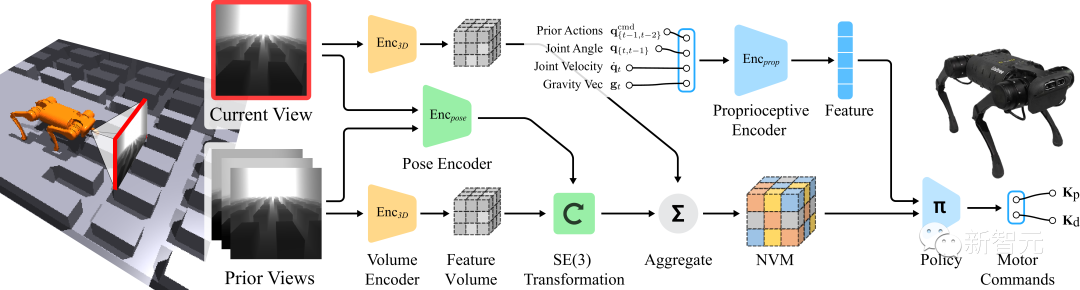
通过自监督学习NVM

解码器的视觉重建
作者介绍




-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号新智元 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
11328
举报
0
-

-
北京
甲方 · 媒体平台
未认证的机构号
recently released
-
2023-12-14
-
2023-11-03











