
- 0
- 0
- 0
分享
- Niantic:未来AR重要场景,VPS众包3D地图到底是啥?
-
原创 2023-01-11

Esther | 编辑
几个世纪以来,人们使用指南针、地图、星盘和象限仪来找路,而在过去二十年里,GPS成为了主流的定位系统,并且与手机结合后,让人们的出行越来越方便。而随着摄像头等技术发展,我们也开始看到视觉定位技术的崛起,比如谷歌地图就推出AR导航功能,将指示标定位在真实场景中。与此同时,Niantic作为一家开发LBS AR游戏的公司,也开始构建基于视觉数据的3D地图平台。与谷歌不同的是,Niantic并不是坐拥大规模数据的老牌科技巨头,其获取数据的方式更多是通过游戏玩家上传。

近期,Niantic首席科学家Victor Priscariu和工程总监Pierre Fite-Georgel深度分享了,通过《精灵宝可梦GO》等LBS AR游戏获取玩家众包数据的过程,以及如何将3D扫描数据处理成可用于开发LBS AR的地图。
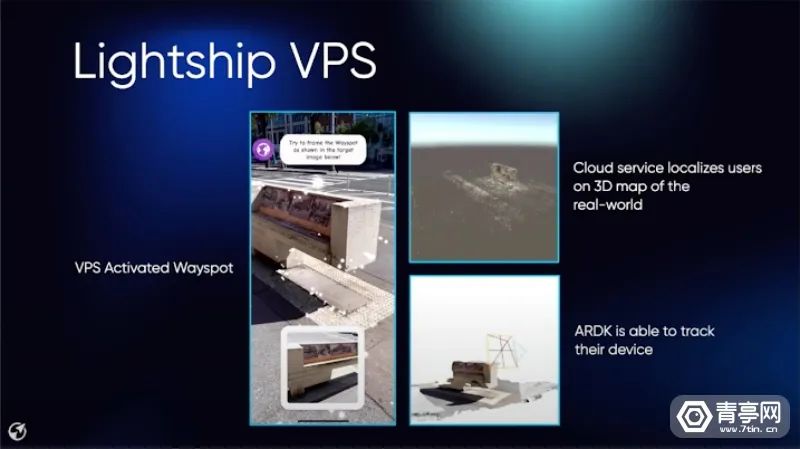
据青亭网了解,Niantic旗下的Lightship VPS视觉定位平台目标是提供一个精确、动态的3D世界地图,允许AR开发者在物理空间中添加、固定AR内容。Niantic指出,如果GPS是真实空间的定位方式,那么VPS更像是虚拟空间的定位方式,它的优势是精度更高,可精确到厘米,而且可以用来开发持续性的AR内容,将虚拟视觉效果和物理空间更好的融合。
VPS定位的难点
最开始,Niantic的LBS AR游戏《精灵宝可梦GO》是基于谷歌GPS地图定位,而现在该公司决定从头开始构建基于视觉的VPS地图,而这将需要克服许多技术挑战,需要一段时间才能完善。Niantic指出,3D AR地图将会动态变化,因为它需要实时更新,反映出物理世界的变化,而目前,基本的开发模块已经到位,AR地图已经在形成。
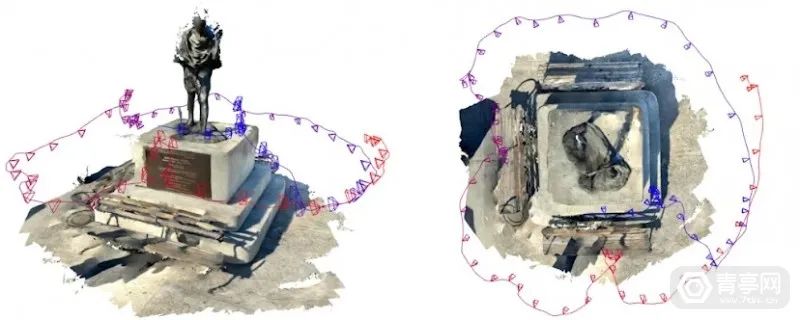
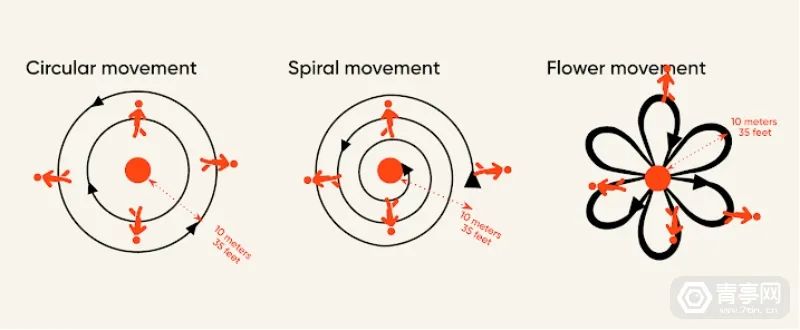
开发3D世界地图要比标准数字地图要更难,因为3D地图覆盖的物理空间更大,尤其是在公园、城镇广场等户外场所。另一方面,在三个维度上重建空间将需要多个角度的大量图像,其中需要包含不同的时间、天气和季节,这样才能模拟动态变化的场景。除此之外,还需要识别场景中的陆地、水域、天空等元素,并计算出它们与人之间的距离关系。
除了手机视觉图像外,Niantic还会收集GPS的经纬度和高度,以及手机的加速计和陀螺仪的传感信息(目的是为了定位扫描人的视角、手机位置和方向)。如果玩家的手机有LiDAR传感器,便可以拍摄周围环境的高分辨率3D视图,这样就可以更好的确定环境中物体的距离。

通过众包构建3D地图
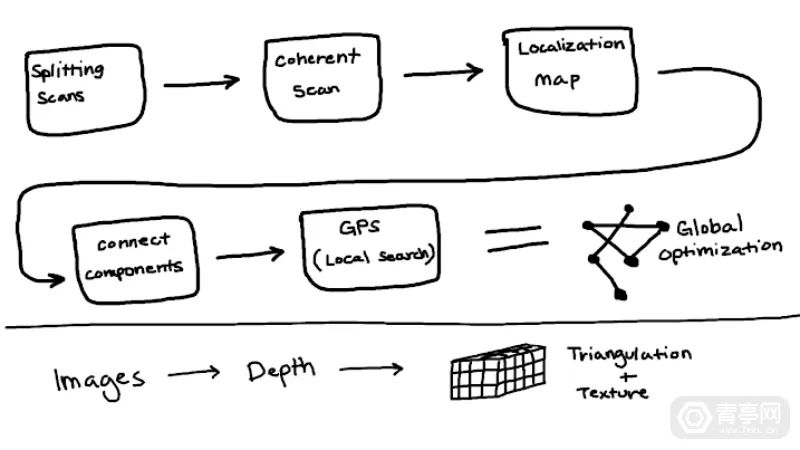
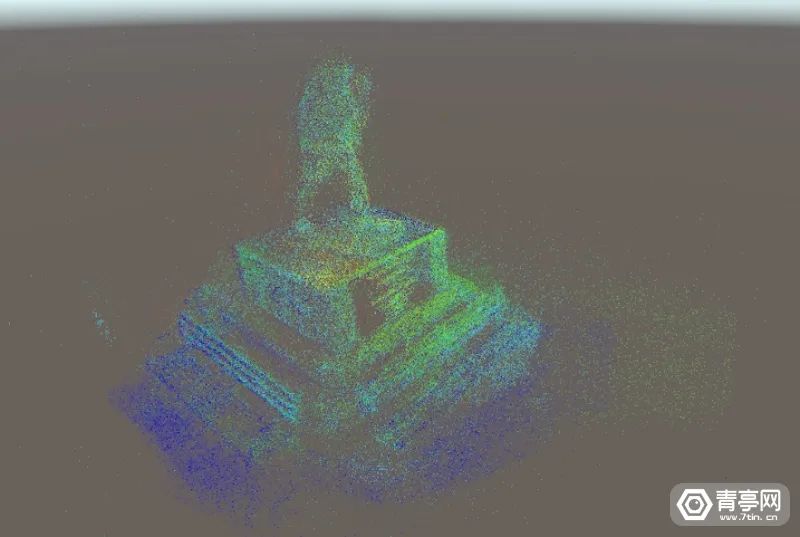
3D地图数据处理过程

拆分扫描,来确定Wayspot的位置; 位置映射:从分割的3D扫描地图中提取位置和方向信息; 对比3D映射图之间的关系,确保它们之间保持连续; 3D密集重建,这个步骤生成的是供计算机理解的深度数据地图,这些数据包括每个像素从相机到对象之间的距离,可用于生成3D网格;值得注意的是,开发者可通过8th Wall WebAR平台获取这些数据,直接用来开发LBS AR应用;此外,也可以通过Wayfarer工具添加新的Wayspot兴趣点和AR地图; 添加上下文和语义信息:在3D深度图基础上,还可以对树、地面、建筑物等目标进行分类,这样就可以帮助AR实现与物理空间的自然交互。
( END)
-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号青亭网 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
-

-
北京
甲方 · 媒体平台
未认证的机构号
recently released
-
2023-07-13
-
2023-07-12











