
- 0
- 0
- 0
分享
- 清华百度升级AIR白皮书2.0:发布车路协同重大突破,全自动驾驶商业化时代到来
-
2022-12-23
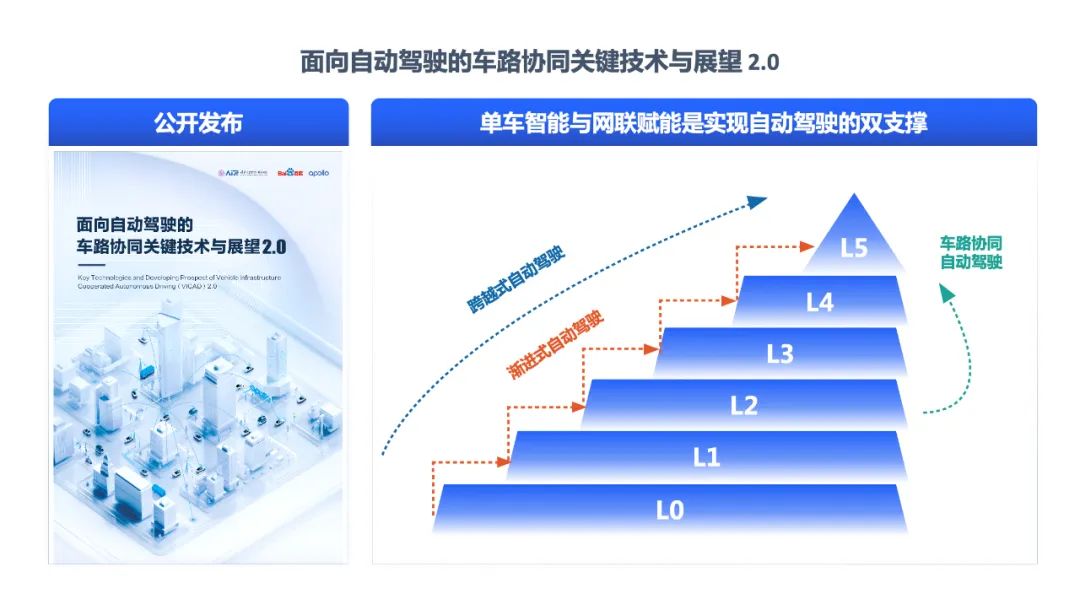
12月23日,全球首份车路协同自动驾驶技术创新白皮书《面向自动驾驶的车路协同关键技术与展望》升级发布2.0版(以下称“白皮书2.0”),并向全行业公开征集意见。该白皮书是全球车路协同技术研究领域最权威的报告之一,由张亚勤院士牵头,清华大学智能产业研究院(AIR)与百度Apollo、中国信息通信研究院、中国信科、中国联通等10余家行业单位共同编制。白皮书2.0进一步探讨中国车路协同自动驾驶(VICAD)发展路线的必然性,提出更加安全、泛化的自动驾驶技术方案和落地路径,加速中国全等级自动驾驶商业化进程,也将助推汽车产业由智能化向网联化发展实现“换道超车”。
中国工程院院士,清华大学讲席教授、智能产业研究院(AIR)院长张亚勤表示,白皮书2.0是一部面向第四次工业革命的技术报告,旨在为自动驾驶与智能交通产业变革提供参考。车路协同自动驾驶既是技术命题,又是产业命题。让普通民众用得起、用得上,是一项跨产业的超级系统工程,可以带动汽车、通信、交通半导体等产业跨越式发展,需要循序渐进,坚持应用导向、市场导向、价值导向。
车路协同自动驾驶加速L4安全无人化运营,泛化服务L2乘用车
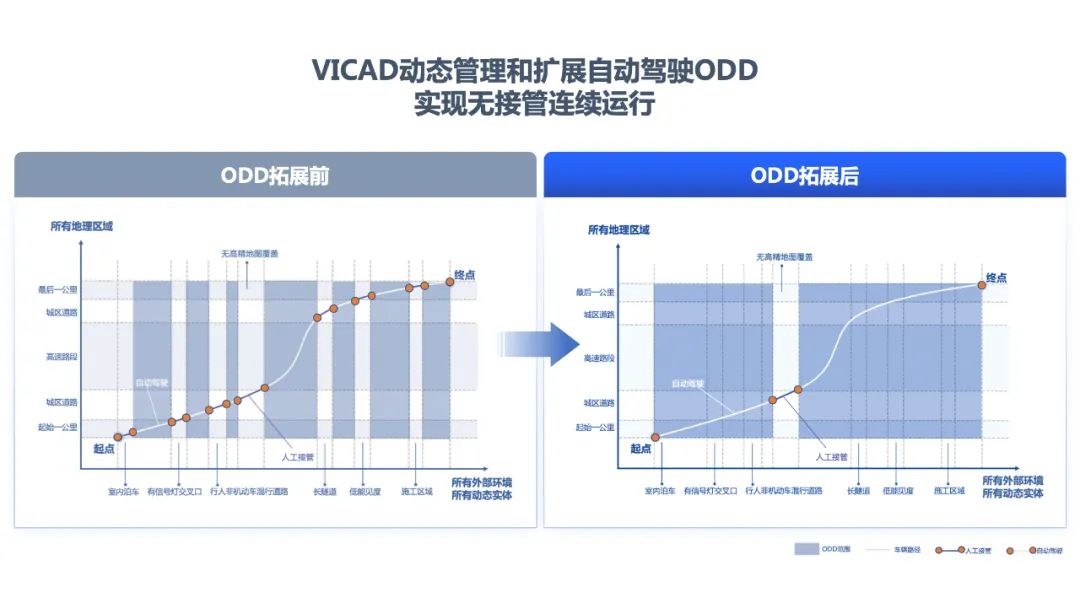
安全是自动驾驶发展的基石,也是现阶段高等级自动驾驶商业化突破需解决的难题。白皮书2.0提出通过车路协同自动驾驶,可以全方位参与L4自动驾驶地图定位、感知、决策规划和控制的全部过程,实现自动驾驶地图动态更新、车路协同感知定位、协同决策控制,全方位保障自动驾驶安全,实现自动驾驶比人类驾驶更安全;L4自动驾驶的发展目标是在保证安全的基础上,实现完全无人化自动驾驶,并达到大规模运营级别,同时车路协同自动驾驶可以动态管理和扩展自动驾驶ODD,实现无接管连续运行,加速L4自动驾驶普及和规模商业化落地。
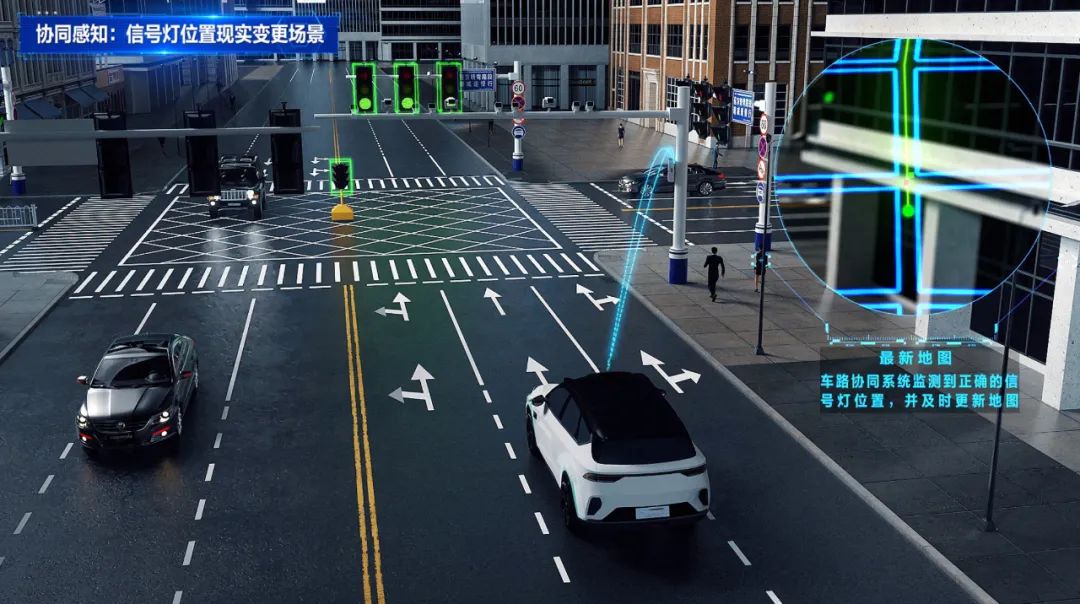
当前L2 自动驾驶发展迅速,同时也存在安全问题高发、功能适用场景有限等现实困境,让消费者望而却步,阻碍商业化进程。白皮书2.0进一步指出,车路协同技术应用已扩展至服务L2量产乘用车,可为 L2 自动驾驶车辆提供协同感知、辅助定位以及部分协同决策规划的作用,使L2车辆实现越级的自动驾驶能力;也能够为驾驶员提前感知路端的道路信息、信号灯态、事故提醒等,带来更安全和智能的驾乘体验,大规模服务L2车辆和普通乘用车。具备了泛化能力的车路协同,将成为汽车产业“换道超车”中国路线的重要组成部分,推动汽车智能化向网联化发展。
对此,百度车路协同首席科学家王淼表示,百度在实践中清晰地看到,车路协同自动驾驶(VICAD)已成为自动驾驶的高阶发展形态和必然趋势。在北京高级别自动驾驶示范区,通过对主城区路口进行智能化升级改造,自动驾驶在相关路口的问题发生频率降低80%以上。面向未来五年自动驾驶规模化应用的关键阶段,当前最重要的是发挥中国政策制度和产业技术优势,形成可运营、可复制、可推广的实践方案,进一步引领全球自动驾驶与智能网联汽车发展。
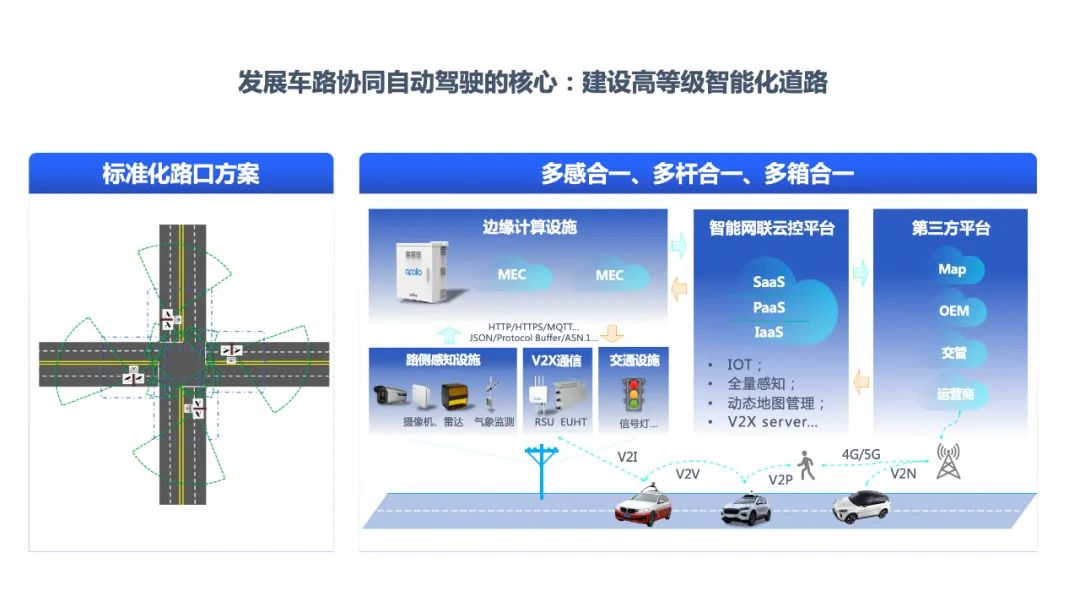
加速建设高等级智能道路,释放“智慧的路”多维价值
领先技术结合丰富实践,百度推出车路协同量产解决方案Apollo Air Auto

日前,国家发布的《扩大内需战略规划纲要(2022-2035年)》指出,要释放出行消费潜力,优化城市交通网络布局,大力发展智慧交通。突破自动驾驶单车技术瓶颈,实现低成本、高安全的自动驾驶商业化落地,是建设发展车路协同自动驾驶的核心目标,也符合释放出行消费潜力的国家战略方针。针对白皮书2.0,清华与百度现面向全行业公开征集意见,携手行业专家学者共同完善车路协同自动驾驶发展路径、加速助推中国自动驾驶产业商业化落地。
关注AIR公众号并回复“白皮书2.0“
获取白皮书下载链接
关于AIR
-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号清华大学智能产业研究院 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
-

-
北京
甲方 · 公立学校
未认证的机构号
recently released
-
2023-04-29
-
2023-04-28
提名奖")










