
- 0
- 0
- 0
分享
- AIR学术|清华助理研究员姜峣:机器人交互感知与自主化操作
-
原创 2023-01-04
12月28日下午,由DISCOVER实验室主办的第17期AIR青年科学家论坛顺利开展。本期活动荣幸地邀请到了清华大学机械工程系助理研究员姜峣博士,为我们线上做题为《机器人交互感知与自主化操作》的精彩报告。

讲者介绍

报告内容
报告背景
姜峣博士首先说明了自动化操作与自主化操作的区别。随着应用场景和操作对象越来越复杂,预编程的、重复性的自动化操作已经几乎无法满足现在的应用需求,下一代机器人操作也逐步向自适应、自学习的自主化操作发展。然而,机器人操作是机器人领域最具挑战性的研究之一,在自主化能力方面与人类相比存在着巨大差距,交互感知能力弱、机械手灵巧性差、操作技能泛化难等都是亟待解决的问题。

指尖多模态触觉感知
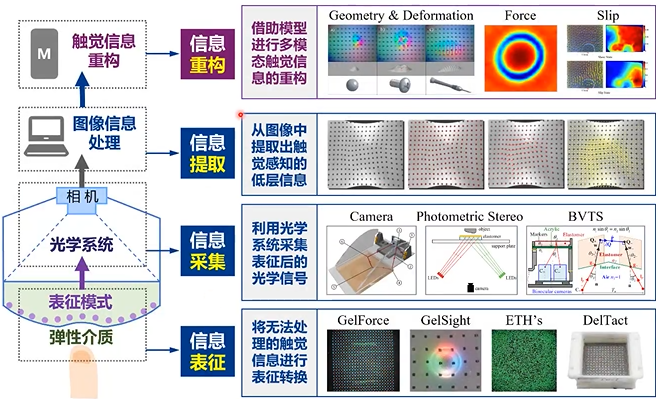
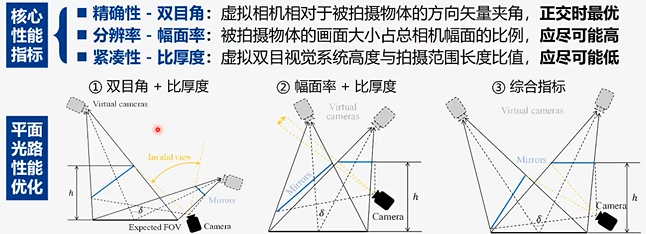
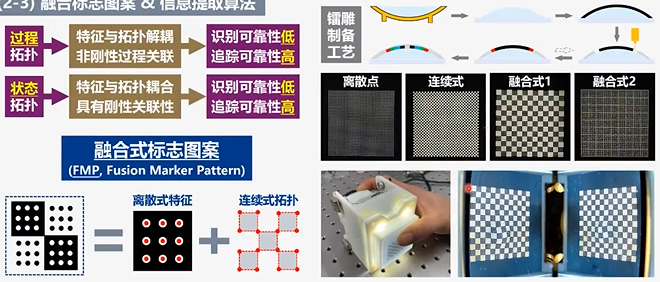
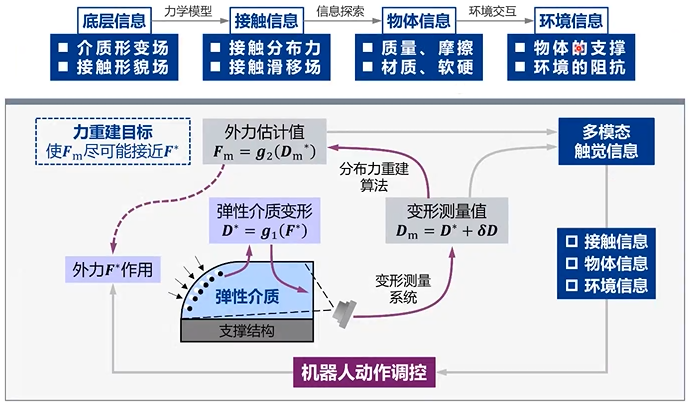
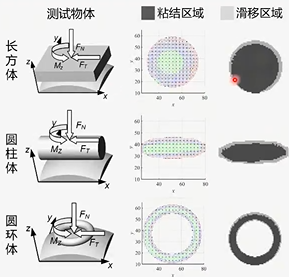
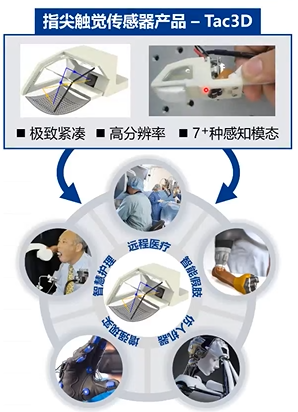
人手触觉中最灵敏、信息密度最丰富的区域在指尖,每平方厘米多达140个感受器,因此指尖的触觉感知尤为重要。面向指尖多模态的触觉感知要求满足紧凑性、精确性、精细性、实时性以及可靠性的性能需求。对于多模态的理解,姜峣博士认为可以参考视觉感知,将其分为低层信息、中层信息和高层信息。







自适应、自学习抓取
抓取是人类最为基本而又重要的技能之一,必将也是机器人拓展工业和日常应用场景所必备的功能。抓取任务涉及到视觉系统、人手构造、触觉传感以及大脑控制,其中的两个重要环节是抓取位形选取以及抓取过程调控。


目标特征自引导装配
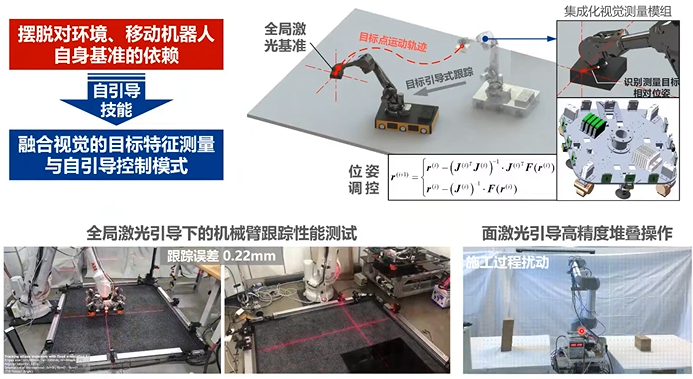
在大尺度施工任务中,如典型的砌墙任务中,不可预知的障碍物以及移动底盘厘米级的定位误差都会导致移动施工机器人施工过程中的基准缺失,且机器人基座并非固定支撑,因而出现受载偏摆。为摆脱对环境、移动机器人自身基准的依赖,姜峣博士提出融合视觉的目标特征测量与自引导控制模式的技能,以实现面向大尺度空间的高精度移动操作机器人系统。
研究方向思考规划
对于后续研究方向的思考和规划,姜峣博士提到会继续聚焦于机器人的交互感知与自主、智能操作,构建涵盖大尺度空间下机器人特征引导与高精操作和机器人自适应自学习操作机理与控制策略的完备理论技术体系,争取突破行业发展的瓶颈,将机器人自主操作应用在建筑施工、航天装配、数字化工厂、智能假肢以及触觉增强现实等目前未被机器人涉足的应用领域。
文稿撰写 / 詹李双
排版编辑 / 王影飘
校对责编 / 黄 妍
AIR长期招聘人工智能领域优秀科研人员
点这里关注我们
关于AIR
清华大学智能产业研究院(Institute for AI Industry Research, Tsinghua University,英文简称AIR,THU)是面向第四次工业革命的国际化、智能化、产业化的研究机构。AIR的使命是利用人工智能技术赋能产业升级、推动社会进步。通过大学与企业创新双引擎,突破人工智能核心技术,培养智能产业领军人才,推动智能产业跨越式发展。
AIR于2020年由多媒体及人工智能领域的世界级科学家、企业家张亚勤院士创建。
智慧交通(AI+Transportation)、智慧物联(AI+IoT)、智慧医疗(AI+Life Science)是清华大学智能产业研究院的三个重点研发方向。
关于DISCOVER实验室
关于DISCOVER实验室
DISCOVER实验室是AIR科研方向的横向支撑实验室之一,旨在利用机器学习、计算机视觉、计算机图形学、机器人学、运筹学、高性能计算与人机交互等前沿技术,围绕车路协同(V2I)、用户直连制造(C2M)、实验室自动化等各应用场景,构建以感知、规划、控制与决策为核心的智能算法平台体系,结合涵盖设计、工艺、计算与人因的智能系统架构体系,研究人-机-边-云四位一体的人在环路多智能体协同系统,开展具有创新性的算法理论与系统架构研究,紧贴以制造业为主的国家重点行业需求,攻克以人为中心的场景理解、人在环路机器学习、仿真到现实迁移与柔性制造工艺等关键技术瓶颈,与产业界深入合作探索自动驾驶与柔性制造的范式转移路径并实现关键技术验证与落地,推动我国在智慧交通和智能制造领域的产业升级。
-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号清华大学智能产业研究院 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
-

-
北京
甲方 · 公立学校
未认证的机构号
recently released
-
2023-04-29
-
2023-04-28
提名奖")










