
- 0
- 0
- 0
分享
- AIR DISCOVER Lab机器人训练营圆满收官!
-
原创 2022-04-20
2022年1月初至3月下旬,AIR DISCOVER Lab 机器人训练营在清华大学智能产业研究院(AIR)成功举办。一直以来,AIR坚持利用人工智能技术赋能产业升级,推动社会进步的使命。作为AIR的技术支撑实验室之一,DISCOVER实验室(DISCOVER Lab)正是秉持这一使命,致力于通过此次机器人训练营进一步吸引和培养智能产业领军人才,推动智能产业跨越式发展。
此次机器人训练营吸引了来自清华大学、中国人民大学、北京理工大学等高校的21名相关专业优秀本科生。同学们在AIR青年导师和科研工程师的带领下,完成了高强度、沉浸式的科研和工程体验,在以下九大前沿领域进行了探索和挑战(以下排名不分先后):机器人集群规划与控制、Robomaster EP 机器人工程挑战、室内三维重建、场景理解的弱监督标注、轮式机器人脱困研究、轮足机器人室内自主导航、强化学习算法的机械臂开发、多模态感知与生成研究、多模态情感计算研究。
获奖项目
在最终答辩展示环节中,同学们收获了耀眼的成果,再次祝贺获奖的队伍:
第一名:基于人工智能音乐治疗项目(江润民, 指导老师:龚江涛)
第二名:基于领航-跟随的多移动机器人编队避障仿真研究项目(邓景天、任天傲、蔺骋昊,指导老师:张鑫亮)
第三名:多模态车路协同仿真数据集生成项目(谭跳、雷宇,指导老师:李楚璇)
一起来看看本届机器人训练营的精彩回顾吧!
部分优秀项目展示
基于人工智能生成的音乐治疗

基于AI生成的音乐治疗
音乐治疗(Music Therapy)是一门集音乐、医学、和心理学为一体的新兴交叉学科。在临床治疗中,音乐治疗师利用音乐体验的各种形式,在一个科学的系统干预过程中辅助被治疗者达到健康。为了使音乐治疗师在治疗过程中实现更加智能和个性化的治疗方式,江润民同学在龚江涛老师的指导下参与了AI + Music Therapy 的研究项目。该项目从音乐推荐和音乐生成两个方向展开了学术探索和工程实现,最终完成了基于情绪的带有心理治疗目的的初级音乐生成人工智能。
基于领航-跟随的多移动机器人编队避障仿真研究

多移动机器人在模拟器中进行仿真
多机器人协同系统因其效率高、自适应性、并发性及鲁棒性强等优点而受到广泛关注。针对多移动机器人在复杂障碍物环境中的编队保持、变换、及实时避障问题,邓景天同学在张鑫亮老师的指导下,参与了基于领航-跟随的多移动机器人编队避障仿真研究。该项目以分布式的领航-跟随结构为基础,使用动态窗口算法和改进的人工势场算法,并通过Gazebo仿真的结果表明:多移动机器人能实现高速情况下的实时跟随与避障,并在复杂障碍物环境中表现出一定的自适应编队变换能力。
多模态车路协同仿真数据集生成

生成的三个数据集中时序同步的数据帧展示
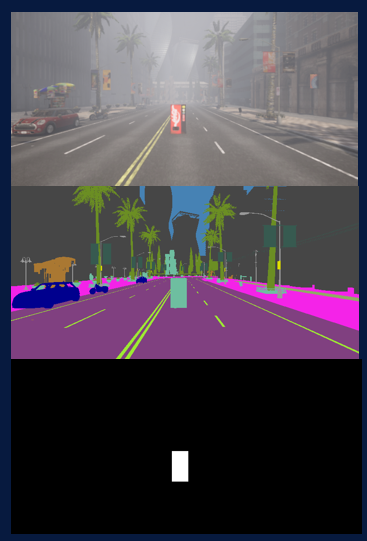
像素级异常标注:仿真道路上的异常物体、与其对应的语义分割图、异常位置标注
为解决真实车路协同系统中数据融合效果不佳的问题,谭跳同学在李楚璇老师的指导下参与了多模态车路协同研究项目,在CARLA平台上成功构建了车路协同仿真数据集。该数据集不仅能同时生成多种外部环境下的多模态数据,还能训练决策模型,从而验证车路协同系统相比单车智能在安全上的优越性。该项目支持将CARLA仿真场景与真实场景对照,以实现数字孪生。
基于Sim2Real的机器人导航系统
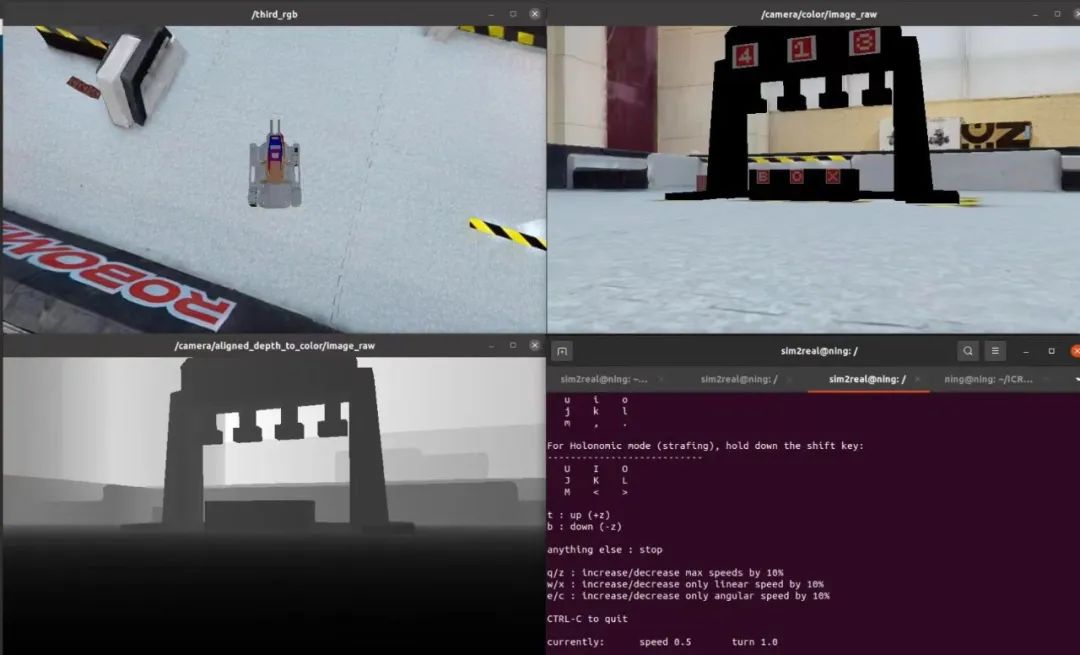
机器人在仿真环境中通过深度相机进行导航
随着机器人需要处理的任务越来越复杂,不断有机器人项目开始使用强化学习进行机器人训练,以求获得更通用、更强健的机器人控制与决策算法。为了降低强化学习的训练难度,这类项目往往会通过虚拟仿真环境降本增效。在石永亮老师的带领下,本项目使用Habitat Simulator作为仿真平台,通过RTAB-MAP和Cartographer激光算法进行SLAM定位和建图。本项目以move_base为导航核心,以Dijkstra算法进行全局规划,采用Teb算法进行局部规划,最终实现了机器人导航最优化。
轮足机器人项目
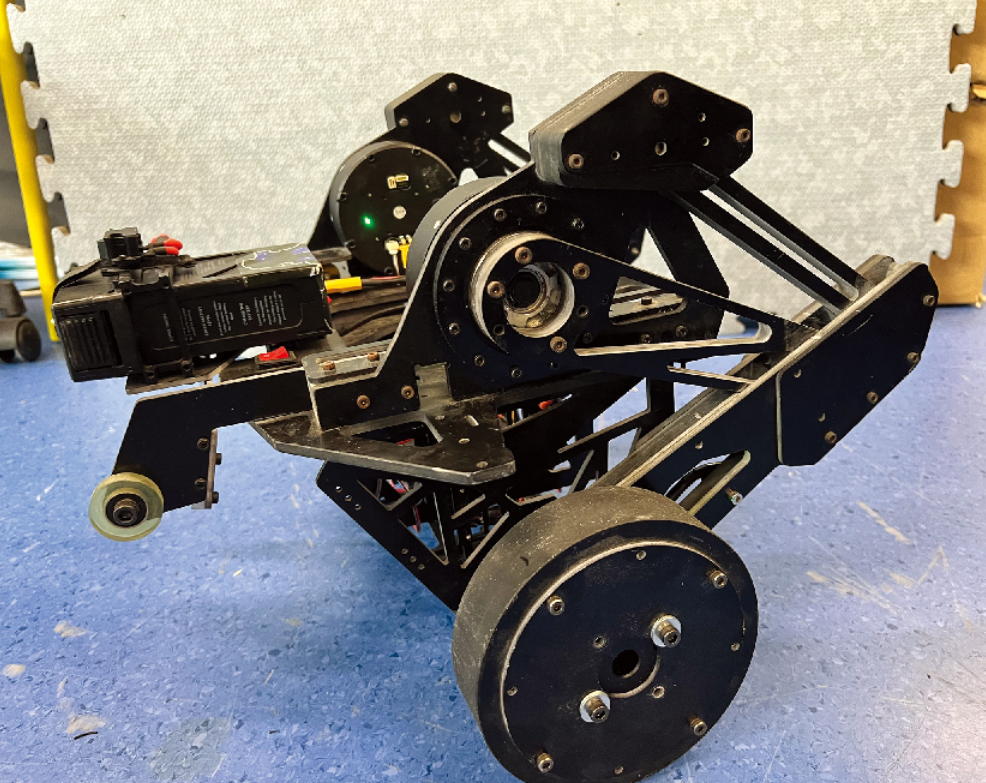
同学们完成的轮足机器人
在常见人居场景下,目前常见机器人底盘如轮式、履带式、足式都有各自的缺点。本项目由张鑫亮老师进行指导,从第一性原理出发,以最精简的硬件系统构成,尝试打造在物流行业中最后一公里真正实用、随处可到达,随处可作业的多机协作机器人平台,最终希望打造下一代通用服务机器人的软硬件基础平台。
我想说…
AIR DISCOVER Lab 机器人训练营在同学和老师们的共同努力下完美收官,一起来听听同学们都是怎么说的吧:
这次冬令营真的对我帮助很大,不仅让我掌握了科研之路的正确打开方式,更使我第一次尝试将人工智能技术应用到音乐治疗项目上。
———基于AI生成的音乐治疗项目
(江润民,南昌大学)
我非常喜欢这边的科研氛围和工程环境,老师,我以后可以经常来么?
———Sim2Real项目
(封蕴籍,北京理工大学)
那几天,我趴在办公桌上一遍一遍地优化门把手的视觉模型,让我领悟到了追求至臻突破极限的心境。
———强化学习机械臂项目
(王英齐,中国矿业大学)
因为疫情,我在家隔离了一段时间,老师就把他的机械狗寄到了我山东老家。之后村里的大黄狗们就有了新老大。
———导盲机器人项目
(单彦博,中国矿业大学)
如果你觉得冬令营很赞,没赶上很可惜。
没关系!那现在夏令营来了!
夏令营将继续围绕AIR和DISCOVER Lab的核心科研主张,在机器人、计算机视觉、和人机交互上围绕人才培养、科研攻关、赋能产业三个核心目标进行科技前沿探索,旨在将成果快速应用于智能交通、绿色计算、先进制造、智慧医疗等领域,促进社会产业发展。欢迎有兴趣的同学们报名参加AIR DISCOVER 2022 暑期夏令营活动。详情请戳:AIR DISCOVER 2022 夏令营开始报名啦!
关于 DISCOVER 实验室
DISCOVER实验室是AIR科研方向的横向支撑实验室之一,旨在利用机器学习、计算机视觉、计算机图形学、机器人学、运筹学、高性能计算与人机交互等前沿技术,围绕车路协同(V2I)、用户直连制造(C2M)、实验室自动化等各应用场景,构建以感知、规划、控制与决策为核心的智能算法平台体系,结合涵盖设计、工艺、计算与人因的智能系统架构体系,研究人-机-边-云四位一体的人在环路多智能体协同系统,开展具有创新性的算法理论与系统架构研究,紧贴以制造业为主的国家重点行业需求,攻克以人为中心的场景理解、人在环路机器学习、仿真到现实迁移与柔性制造工艺等关键技术瓶颈,与产业界深入合作探索自动驾驶与柔性制造的范式转移路径并实现关键技术验证与落地,推动我国在智慧交通和智能制造领域的产业升级。
关于AIR
-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号清华大学智能产业研究院 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
-

-
北京
甲方 · 公立学校
未认证的机构号
recently released
-
2023-04-29
-
2023-04-28
提名奖")










