

—— 青亭网

分享
原创 2022-03-10
Esther|编辑
近年来,企业和品牌利用AR的3D可视化功能来远程辅助维修、指导用户对产品自检的案例越来越多。AR的好处是可以为用户带来额外信息,比如将3D虚拟指示固定在物理空间中,或是叠加在需要操作的设备上,帮助用户直观、准确的了解操作步骤。利用AR可视化指导方案,甚至可以帮助新员工快速了解工作流程。
那么,如果将AR用于实验室中,是不是也可以帮助实验人员更直观的查看实验步骤,从而提升实验的准确性和效率呢?
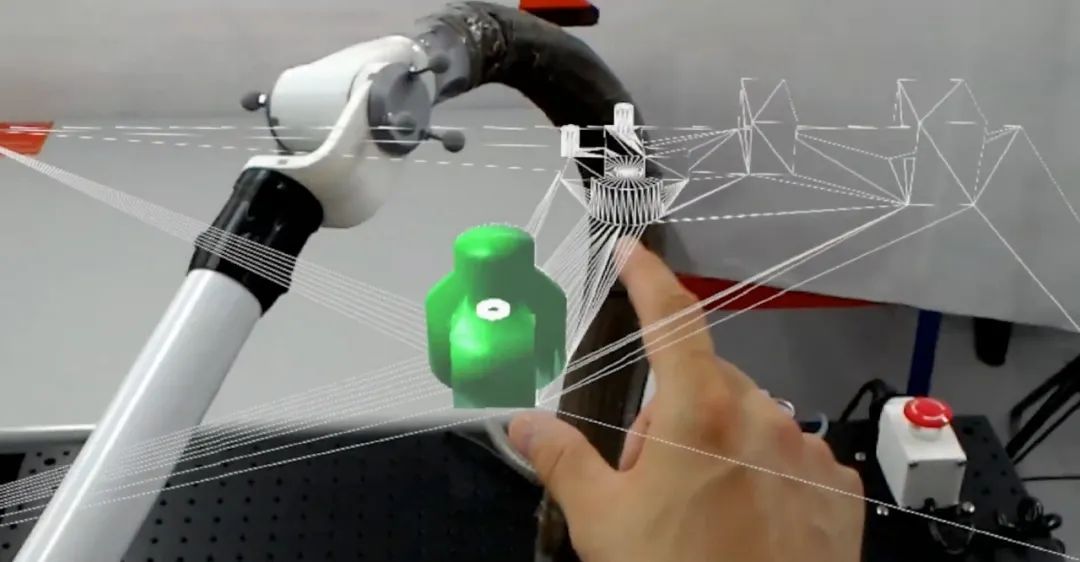
近期,英国帝国理工大学REDS实验室就进行了这样一种尝试,将AR可视化用来规范柔性机械臂的手动设置流程。整个实验的流程是,戴上HoloLens的实验员用手势操作,将虚拟的AR机械臂移动到设定好的位置上,然后再用手将真的机械臂移动到AR的位置,按照虚拟机械臂的形状去摆放。
如此一来,实验员可以更准确、直观的设置柔性机械臂,这与参考2D图片相比,效率更高,而且误差也更小。据了解,利用AR来对齐机械臂的平均误差约为10.54±4.32毫米,比没有AR辅助的手动对齐误差更低(高达19.62毫米),说明AR可视化明显降低了手动调试的误差。
柔性机械臂实验痛点
在工业领域,机械臂常用于自动化作业等场景,比如进行自动装配、喷气、搬运、焊接等工作。与工业领域常见的关节机器人/多轴机械臂相比,柔性机械臂的优势在于扭转方向和程度更灵活,不受关节旋转角度限制,可弯曲成各种形状。而且易于定制,适用于制造、航天器维护、损伤复健等场景。

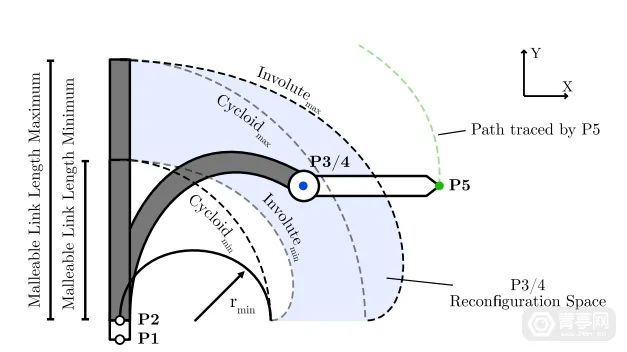
不过,柔性机械臂运动方式更加复杂,其运动轨迹是非线性的,因此需要建立动力学模型来动态控制。此外,柔性机械臂可辅助关节机器人,作为灵活的第三只手臂来进行分担工作量。
与硬性的关节机械臂相比,柔性机械臂更难操作,尤其是用手动来塑形可能会产生误差。通常,培训柔性机械臂的时候需要先手动将它塑造成任务所需的形状,而在没有指导的情况下,实验员很难将机器人配置成准确的形状。

科研人员表示:多自由度机器人在设计、轨迹规划和方向控制等方面都存在难度,而这也是许多围绕机器人设计的实验中普遍面临的问题。随着机器人和计算技术不断发展,操控机械臂的准确性和可重复性越来越高,不过在一些任务中,需要由人来手动操作机械臂,而这可能会影响任务的准确性。
这是因为,计算机的意图很难与人工操作者同步(因为人脑需要将2D配置图转化成3D场景,这个过程和手动操作的过程可能会存在误差),这时候AR可视化成为一种有效的解决方案。
AR可视化解决问题
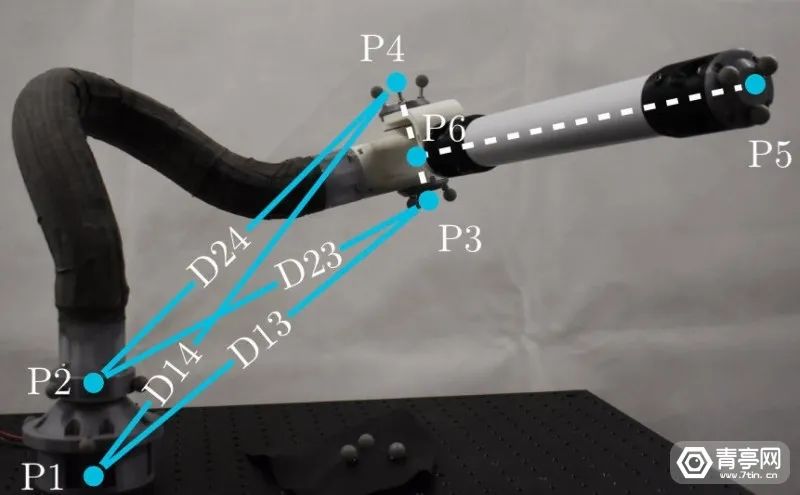
因此,REDS实验室的科研人员研发了一个AR可视化系统,通过直观的AR指示,来辅助机械臂培训。实验中采用的机械臂由柔性和硬性部分组成,其中柔性部分内含聚脂薄膜层,具有一定程度的可塑性,在弯曲后可以固定位置。

据了解,REDS实验室研发团队分别来自于计算机系和戴森设计工程学院的学生,戴森设计工程学院是戴森公司投资冠名的学院,戴森在在2014年投资帝国理工500万英镑,建立机器人实验室。
该研究论文高级作者Nicolas Rojas博士表示:手动调整机械臂的一大难点是位置移动的准确性,仅依靠目测效果不好,因此需要用AR可视化来辅助。
简单来讲,AR在这场科研实验中的作用是,辅助实验员手动塑型/调整机械臂,将机械臂训练变得更直观、标准化。细节方面,HoloLens通过摄像头来定位AR,而使用者则可以看到叠加在真实场景中的AR指示,也可以用手调整AR的位置。通过将机械臂与AR可视化模板重叠,你可以将它锁定到正确的方位。
实际上,用AR提供可视化指导的关键是将空间信息和虚拟标记结合,显示准确的3D空间关系,从而提升AR指导的准确性。在此前Rosen等人进行的一项实验中就发现,利用AR头显来标记撞击的准确率高达75%,而利用移动2D AR来标记的准确性为65%,说明立体AR指导的准确性更好,可提供更直观的空间定位效果。
实验结果
接下来,为了验证AR指导方案的效果,科研人员在5名男性中进行实验,这5个人的年龄在20到26岁之间,他们拥有机器人技术知识,不过缺少专门操作柔性机器人的经验。结果发现,参与实验的5个人均可准确调试机器人。
经过证明,科研人员发现AR可简化柔性机械臂实验的过程,实验人员不需要很多技术经验也能操作。而在后续的体验调查中,大多数参与者对AR可视化方案比非AR方案更感到满意。
不过,利用AR指导操作依然存在误差,其原因可归结为以下几种:1)手势追踪误差;2)AR定位误差、缺少自动动态的对齐系统;3)3D渲染的刷新率低,快速移动头部可能会导致AR图像位移。此外,柔性机械臂不能像硬性机械臂那样维持其形状,柔性部分可能会受到硬性部分影响而偏移位置。
总结
总体来讲,这是一项探索人机交互(HRI)的实验。尽管HRI已经是一个得到充分研究的领域,但大多数科研人员认为,目前依然需要一种方式来帮助人类和机器人对空间的理解达成共识。传统基于2D显示屏的方案并不直观,使用者需要抬头对比屏幕来确认每一步操作,整个过程比较繁琐,而且可能存在误差。
相比之下,AR的可视化特性可进一步提升人机交互的效率、准确性。利用AR来指导机械臂操作的方案, 潜在的应用场景还包括制造、建筑、车辆维护、辅助病人复健等等,甚至还可以在航天器上使用。
接下来,科研人员计划将AR可视化与触觉、音频反馈结合。目前,确认机械臂配置主要通过视觉提示,而结合音频和触觉等额外的感知提示,有望进一步提升机械臂配置的准确性。
此外,也计划将AR可视化用于硬性机械臂实验中,因为硬性机械臂比柔性机械臂更容易固定,操控的准确性和精度更好。
参考:
https://spiral.imperial.ac.uk/bitstream/10044/1/94598/2/Augmented%20reality%20malleable%20robots%20%28Final%20version%29.pdf
( END)
* 文章为作者独立观点,不代表数艺网立场转载须知

北京
甲方 · 媒体平台
未认证的机构号
2023-07-13
2023-07-12
广告 欺诈 淫秽 色情 侵权 骚扰、辱骂、歧视 敏感 违法 犯罪 反动、政治 其它
数艺网是一个信息获取、分享及传播的平台,我们尊重和鼓励数艺网用户创作的内容,认识到保护知识产权对数艺网生存与发展的重要性,承诺将保护知识产权作为数艺网运营的基本原则之一。
本条款原则如下:
1. 用户在数艺网上发表的全部原创内容(包括但不仅限于文章、案例/项目和评论),著作权均归用户本人所有。用户可授权第三方以任何方式使用,不需要得到数艺网的同意。
2. 数艺网上可由多人参与编辑的内容,包括但不限于案例/作品的认领、企业/机构的认领,所有参与编辑者均同意,相关知识产权归数艺网所有。
3. 数艺网提供的网络服务中包含的标识、版面设计、排版方式、文本、图片、图形等均受著作权、商标权及其它法律保护,未经相关权利人(含数艺网及其他原始权利人)同意,上述内容均不得在任何平台被直接或间接发布、使用、出于发布或使用目的的改写或再发行,或被用于其他任何商业目的。
4. 为了促进知识的分享和传播,用户将其在数艺网上发表的全部内容,授予数艺网免费的、不可撤销的、非独家使用许可,数艺网有权将该内容用于数艺网各种形态的产品和服务上,包括但不限于网站以及发表的应用或其他互联网产品。
5. 第三方若出于非商业目的,将用户在数艺网上发表的内容转载在数艺网之外的地方,应当在作品的正文开头的显著位置注明原作者姓名(或原作者在数艺网上使用的帐号名称),给出原始链接,注明「发表于数艺网」,并不得对作品进行修改演绎。若需要对作品进行修改,或用于商业目的,第三方应当联系用户获得单独授权,按照用户规定的方式使用该内容。
6. 数艺网为用户提供「保留所有权利,禁止转载」的选项。除非获得原作者的单独授权,任何第三方不得转载标注了「禁止转载」的内容,否则均视为侵权。
7. 在数艺网上传或发表的内容,用户应保证其为著作权人或已取得合法授权,并且该内容不会侵犯任何第三方的合法权益。如果第三方提出关于著作权的异议,数艺网有权根据实际情况删除相关的内容,且有权追究用户的法律责任。给数艺网或任何第三方造成损失的,用户应负责全额赔偿。
8. 如果任何第三方侵犯了数艺网用户相关的权利,用户同意授权数艺网或其指定的代理人代表数艺网自身或用户对该第三方提出警告、投诉、发起行政执法、诉讼、进行上诉,或谈判和解,并且用户同意在数艺网认为必要的情况下参与共同维权。
9. 数艺网有权但无义务对用户发布的内容进行审核,有权根据相关证据结合《侵权责任法》、《信息网络传播权保护条例》等法律法规及数艺网社区管理规定对侵权信息进行处理。
侵权举报
1.处理原则
数艺网作为新媒体艺术领域的分享交流平台,高度重视自由表达和个人、机构正当权利的平衡。依照法律规定删除违法信息是数艺网社区的法定义务,数艺网社区亦未与任何中介机构合作开展此项业务。
2.受理范围
受理数艺网社区内侵犯机构或个人合法权益的侵权举报,包括但不限于涉及个人隐私、造谣与诽谤、商业侵权。
a.涉及个人隐私:发布内容中直接涉及身份信息,如个人姓名、家庭住址、身份证号码、工作单位、私人电话等详细个人隐私;
b.造谣、诽谤:发布内容中指名道姓(包括自然人和机构)的直接谩骂、侮辱、虚构中伤、恶意诽谤等;
c.商业侵权:泄露机构商业机密及其他根据保密协议不能公开讨论的内容。
3.举报条件
用户在数艺网发表的内容仅表明其个人的立场和观点,并不代表数艺网的立场或观点。如果个人或机构发现数艺网上存在侵犯自身合法权益的内容,可以先尝试与作者取得联系,通过沟通协商解决问题。如您无法联系到作者,或无法通过与作者沟通解决问题,您可通过点击内容下方的举报按钮来向数艺网平台进行投诉。为了保证问题能够及时有效地处理,请务必提交真实有效、完整清晰的材料,否则投诉将无法受理。您需要向数艺网提供的投诉材料包括:
a. 权利人对涉嫌侵权内容拥有商标权、著作权和/或其他依法可以行使权利的权属证明,权属证明通常是营业执照或组织机构代码证;
b. 完整填写的通知书;附供下载的:侵权投诉通知书;
c. 举报人的身份证明,身份证明可以是身份证或护照;
d. 如果举报人非权利人,请举报人提供代表权利人进行举报的书面授权证明。
e. 为确保投诉材料的真实性,在侵权举报中,您还需要签署以下法律声明:
(1) 我本人为所举报内容的合法权利人;
(2) 我举报的发布在数艺网社区中的内容侵犯了本人相应的合法权益;
(3) 如果本侵权举报内容不完全属实,本人将承担由此产生的一切法律责任,并承担和赔偿数艺网因根据投诉人的通知书对相关帐号的处理而造成的任何损失,包括但不限于知乎因向被投诉方赔偿而产生的损失及数艺网名誉、商誉损害等。
4.处理流程
出于网络平台的监督属性,并非所有申请都必须受理。数艺网自收到举报的七个工作日内处理完毕并给出回复。处理期间,不提供任何电话、邮件及其他方式的查询服务。 出现数艺网已经删除或处理的内容,但是百度、谷歌等搜索引擎依然可以搜索到的现象,是因为百度、谷歌等搜索引擎自带缓存,此类问题数艺网无权也无法处理,因此相关申请不予受理。您可以自行联系搜索引擎服务商进行处理。 此为数艺网社区唯一的官方侵权投诉渠道,暂不提供其他方式处理此业务。 用户在数艺网中的商业行为引发的法律纠纷,由交易双方自行处理,与数艺网无关。
免责申明
1.数艺网不能对用户发表的回答或评论的正确性进行保证。
2.用户在数艺网发表的内容仅表明其个人的立场和观点,并不代表数艺网的立场或观点。作为内容的发表者,需自行对所发表内容负责,因所发表内容引发的一切纠纷,由该内容的发表者承担全部法律及连带责任。数艺网不承担任何法律及连带责任。
3.数艺网不保证网络服务一定能满足用户的要求,也不保证网络服务不会中断,对网络服务的及时性、安全性、准确性也都不作保证。
4.对于因不可抗力或数艺网不能控制的原因造成的网络服务中断或其它缺陷,数艺网不承担任何责任,但将尽力减少因此而给用户造成的损失和影响。
协议修改
1.根据互联网的发展和有关法律、法规及规范性文件的变化,或者因业务发展需要,数艺网有权对本协议的条款作出修改或变更,一旦本协议的内容发生变动,数艺网将会直接在数艺网网站上公布修改之后的协议内容,该公布行为视为数艺网已经通知用户修改内容。数艺网也可采用电子邮件或私信的传送方式,提示用户协议条款的修改、服务变更、或其它重要事项。
2.如果不同意数艺网对本协议相关条款所做的修改,用户有权并应当停止使用数艺网。如果用户继续使用数艺网,则视为用户接受数艺网对本协议相关条款所做的修改。
阅读并同意此认领协议方可认领案例
*认领案例的操作记录无法自行删除,请务必确保您参与该案例身份的真实性











