- 0
- 0
- 1
分享
- AIR DISCOVER|董先科:基于光遗传学的活体线虫运动控制
-
2021-09-30
生物本身即最完美的机器人,在数百万年的进化中,生物发展了复杂的身体结构、高效的能量流动和先进的运动控制系统,为微型机器人的设计提供了巨大的灵感,也为微米尺度机器人的创新提供了优秀的范本。
——董先科
9月29日傍晚,AIR DISCOVER青年科学家论坛第二期在清华大学智能产业研究院(AIR)图灵报告厅举行。本期活动荣幸地邀请到因造出活的微型机器人而荣登Science子刊的90后青年科学家董先科博士,为我们作题为《通过光遗传运动控制秀丽隐杆线虫,实现活的微型软体机器人》的报告。

报告内容
生物的许多行为给人类的发明创造提供了许多启示,模仿和控制生物体的运动,一直以来都是科学家们不断探索和追寻的目标。这不仅仅对仿生机器人的制造提供许多灵感,还能从中发掘一些此前人类不曾注意到的现象,从而给医工结合的领域带来全新的机遇。
董先科博士采用麻醉的活体线虫作为材料,利用激光照射线虫使其体内特殊蛋白通道打开来控制线虫的运动,最终让其完成了穿越迷宫的任务。
1. RoboWorm简介

线虫是动物界中最丰富者之一,绝大多数营自生生活,易于培养,发育较快,室温下只需60小时便可以从卵发育为成年,大约100微米长,且身体透明,便于内部组织成像。此外,线虫的结构简单,只有大约1000个体细胞和300个神经元,它的神经系统连接已经被科学家们掌握。
先科博士的思路似乎十分简单而清晰,他说:“创造小型机器人最有效的途径就是学习现有的微生物组织的运动。”在了解到此前有很多前辈对微生物运动的模拟和控制进行研究,且有人已经用激光照射控制肌肉运动后,先科博士很自然地想到了这一点,当被问道为什么选线虫,他说是恰好实验室提供了线虫。
2. 线虫的运动的原理
尽管现有的研究表明激光可以刺激肌肉等组织的收缩,但是如何精确地控制一条线虫的运动,却并没有人告诉董先科怎么做。为了解答这个问题,他深入研究了蛇行运动的机理,虫体和环境的相互作用以及身体各部位的收缩是如何推动线虫前进和转弯的。他用荧光成像技术仔细研究了线虫运动时的肌肉反应,在这期间他还发现线虫肌肉活动最强的部位和线虫身体曲率最大的部位并不在一个地方,而是有一个恒定的相位差,大约在40°~50°,而且,当线虫反向运动时,相位差也随之反向,这个发现对于精确控制线虫的运动具有极大的意义。
用简单的正弦函数描述线虫的最大曲率和最大肌肉活动强度变化后,可以利用简单的公式推导证明这种相位差确实给线虫带来了推力:
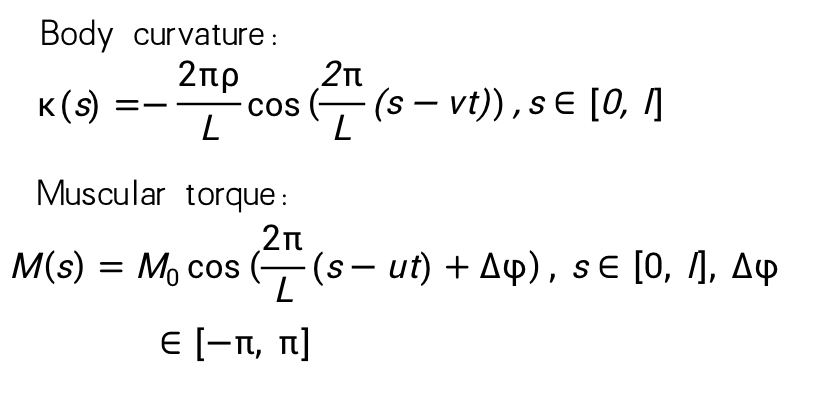


从上述推导中不难看出,如果肌肉活动强度最大处和身体曲率最大处相位差为0,那么任何推力都不会产生——线虫只能在原地扭来扭去。
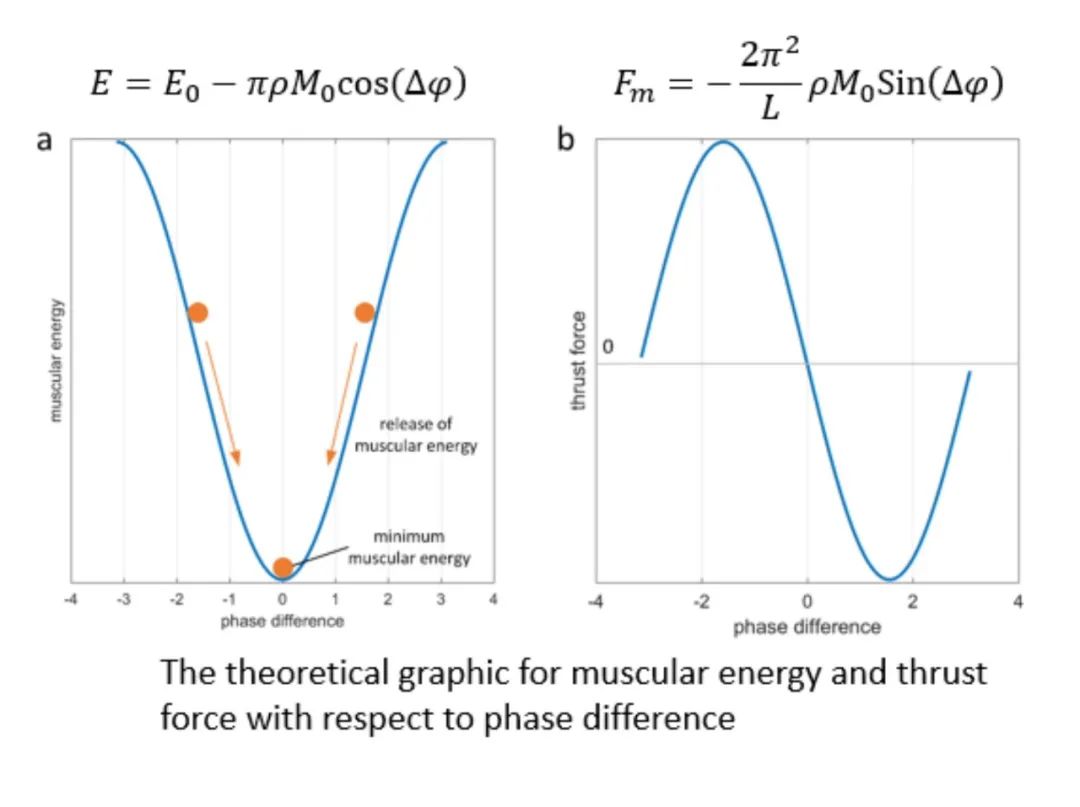

先科博士随后对线虫的运动进行了建模:

注:上图F具有力矩的量纲,而M具有力矩×距离的量纲。
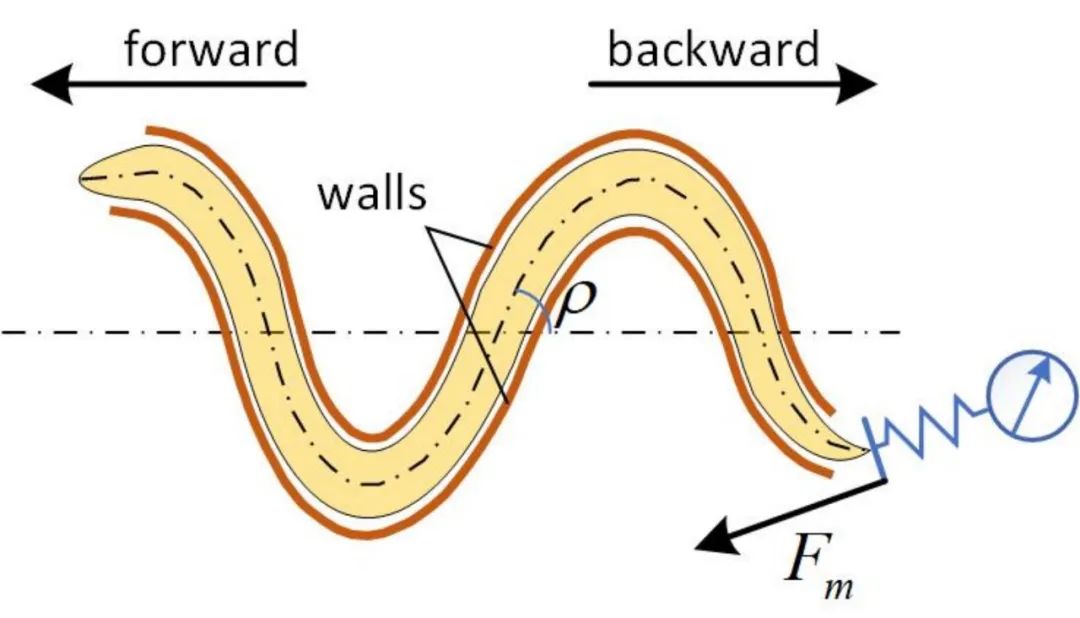
模拟线虫在一个蛇形管内的运动,假设没有摩擦阻力,通过给虫体一个扭矩,便可以在虫尾测量它产生的推力大小。最终实验结果和理论分析吻合地很好。

注:上图p是激光照射角,不同的p对应着不同的蛇形身体形态。
3. 控制线虫运动
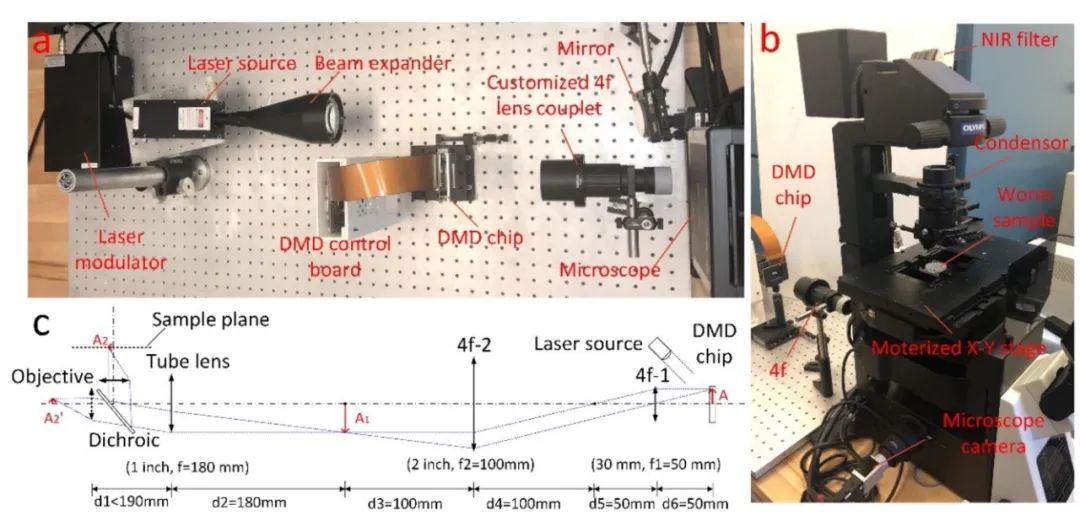
先科博士设计了一套自主的激光照射系统,他是用一束蓝激光打在一个DMD(digital micromirror array)装置上,这是一个二维的微镜阵列,对其编程可以使其反射并生成想要的激光图样,最终它经过透镜汇聚到线虫相应部位上。
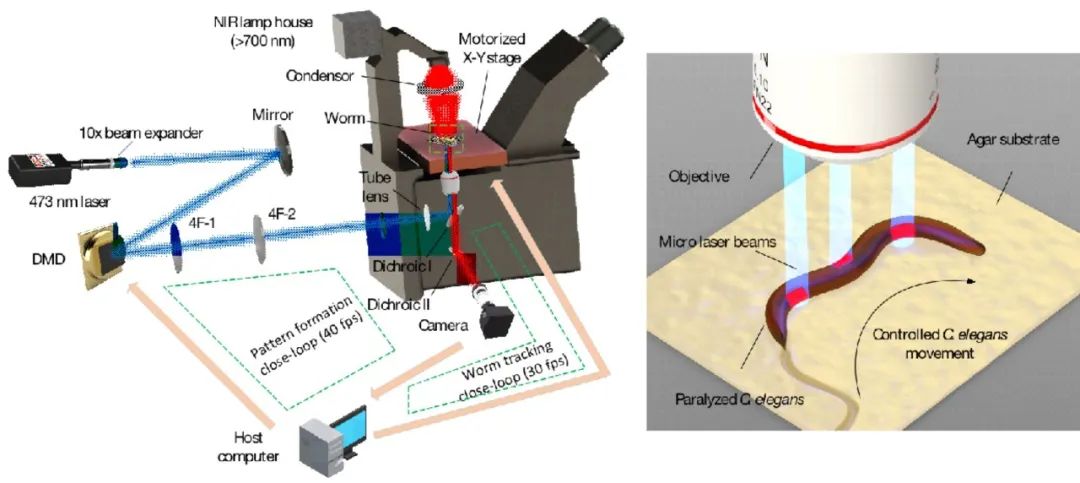
在控制的过程中,如何建立一个负反馈机制来不断调整线虫的运动,也是一个不小的工程难题,在大量的实验和调参过程后,先科认为均匀的激光强度更为可靠,于是设计了一个算法将原本为高斯分布的激光强度均匀化了。此外,为了更好地分析应该刺激哪块肌肉群,先科还将线虫分为许多部分进行研究,最多的时候分成了每边100个部分。

由于生物体对外界条件的反应几乎从来都不是线性的,有时候甚至不是单调的,设置一个合适的激光强度和照射时间等也是不小的挑战,但是董先科成功了,他模拟出了自然线虫的直行和各种复杂动作,如shallow type-I turn, shallow type-II turn, gradual turn, 甚至omega turn。
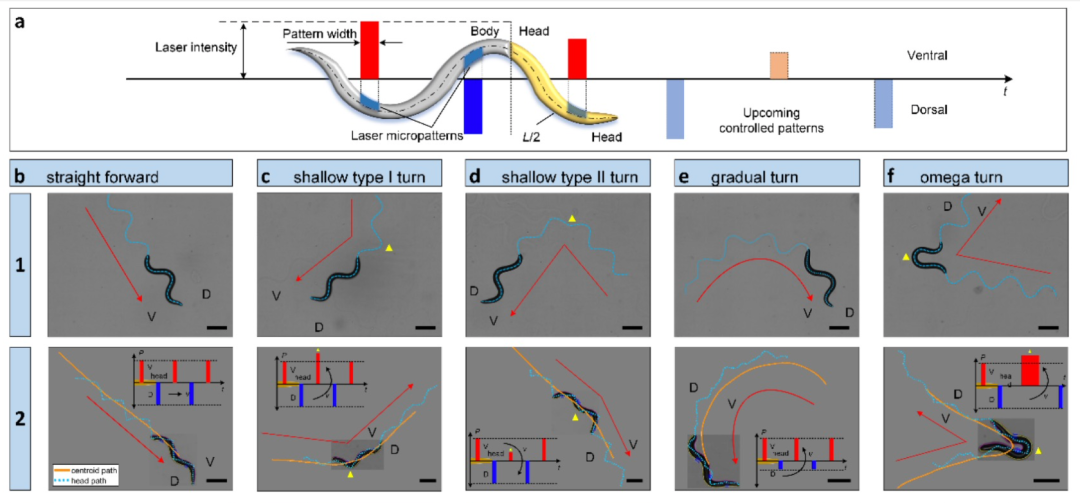
完整的控制流程如下图所示:

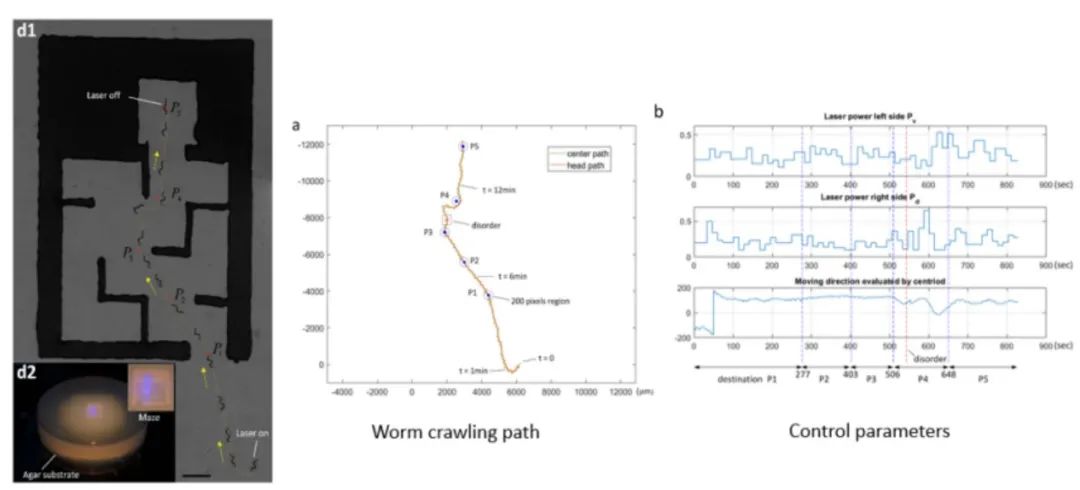
最后,先科成功地控制一条“沉睡”的线虫穿越了迷宫:
4. 对理论的验证
光解决工程上的问题并不够,如果不能对建立的假说做一个有效的验证,那这一切的根基便无从说起。由于直接测量线虫微小的推力十分困难,先科利用了两点推理:一是匀速前进时,线虫的速度,推力和相位差都应该是一个常数,那么速度应该和激光照射速度相等;二是匀速前进时,推力显然和来自琼脂的粘滞力和摩擦力平衡。他随后用实验验证了这两个猜想:

注:上图中,受激速度和激光照射速度紧密相等,受激速度随相位差单调减小。
5. 回顾与展望
为什么不重新做一个机器人,而要用虫来代替呢?因为“生物本身即最完美的机器人”,董博士说。在数百万年的进化中,生物发展了复杂的身体结构、高效的能量流动和先进的运动控制系统,为微型机器人的设计提供了巨大的灵感,也为微米尺度机器人的创新提供了优秀的范本。
能在Science子刊上发表论文是一件很不容易的事情,这位90后青年科学家在接受AIR采访时表示,如何让线虫机器人做蛇形运动,是他研究时遇到的最大困难。传统的蛇形机器人设计,往往将结构等效为串联杆件模型,用拉格朗日方程建立动力学模型,但这种方法只能控制机器人的姿态。线虫的环境里,摩擦和粘滞是同时存在的,要让线虫机器人动起来需要弄清楚线虫运动动力学的一些本质问题。
未来,他也将继续沿着这条道路,做出更多具有广阔视野、前沿观念的学术研究,为世界贡献青年力量!
讲者简介

董先科博士现任拿大多伦多一家科技公司担任算法研发工程师,负责嵌入式高帧率目光跟踪系统的算法开发,以及在医疗AR和辅助驾驶场景的应用。董博士于2012年获哈尔滨工业大学航天学院自动化专业学士学位;2019年获加拿大麦吉尔大学机械工程系获得博士学位。董博士曾先后于Science Robotics, IEEE T-MECH, IEEE T-ASE, IEEE T-BME, IEEE T-NBS, ICRA等权威期刊和会议发表学术论文20余篇,曾以第一作者身份获得机器人领域顶级学术会议ICRA2015的最佳会议论文提名奖和最佳自动化论文提名奖。他的研究兴趣包括图像处理与机器视觉,机器学习与深度学习,微机器人和机器人控制等方向。
精彩回顾
公众号回复“线虫机器人”
下载本次讲座PPT
AIR DISCOVER Lab
DISCOVER Lab是AIR科研方向的横向支撑实验室之一,旨在利用机器学习、计算机视觉、计算机图形学、机器人学、运筹学、高性能计算与人机交互等前沿技术,围绕车路协同(V2I)、用户直连制造(C2M)、实验室自动化等各应用场景,构建以感知、规划、控制与决策为核心的智能算法平台体系,结合涵盖设计、工艺、计算与人因的智能系统架构体系,研究人-机-边-云四位一体的人在环路多智能体协同系统,开展具有创新性的算法理论与系统架构研究,紧贴以制造业为主的国家重点行业需求,攻克以人为中心的场景理解、人在环路机器学习、仿真到现实迁移与柔性制造工艺等关键技术瓶颈,与产业界深入合作探索自动驾驶与柔性制造的范式转移路径并实现关键技术验证与落地,推动我国在智慧交通和智能制造领域的产业升级。
撰文 / 杨政昊 魏欣葳 冼晓晴
编辑排版 / 魏欣葳 冼晓晴
校对责编 / 黄妍
关于AIR
往期精彩:
Aiming higher!AIR首批工程博士入学:创新思维 + 产业经验
-
阅读原文
* 文章为作者独立观点,不代表数艺网立场转载须知
- 本文内容由数艺网收录采集自微信公众号清华大学智能产业研究院 ,并经数艺网进行了排版优化。转载此文章请在文章开头和结尾标注“作者”、“来源:数艺网” 并附上本页链接: 如您不希望被数艺网所收录,感觉到侵犯到了您的权益,请及时告知数艺网,我们表示诚挚的歉意,并及时处理或删除。
-

-
北京
甲方 · 公立学校
未认证的机构号
最近发布
-
2023-04-29
-
2023-04-28
提名奖")










